8-bit FAST Microcontrollers Family
This 6805 SOC is an advanced 8-bit MCU IP Core with highly sophisticated, on chip peripheral capabilities. The 6805 soft core is binary-compatible with the industry
standard Motorola 68HC05 8-bit microcontroller and can achieve a performance 45-100 million instructions per second. This 6805 Microcontroller Core contains a mini UART,
two 8-bit timer, read-only memory (ROM), DoCDTM(DCD Hardware Debug System) and can also be equipped with the Synchronous Serial Peripheral Interface
(SPI). .
In contrast to other on-chip debuggers the DoCD provides a non-intrusive debugging of running application. It can halt, run, step into or skip an instruction, read/write any contents of microcontroller including all registers, SFRs including user defined peripherals, data and program memories.
Features:
Note: A line over a signal name indicates an active low signal.
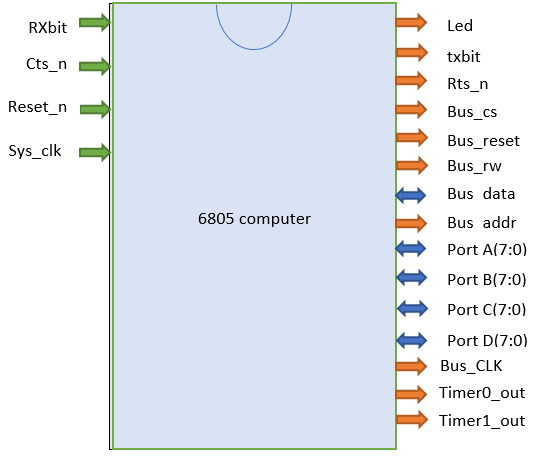
Pin Description
| PIN | Type | Interface | Description |
|---|---|---|---|
| Rxbit | Input | Mini-Uart | RS-232 data input |
| Txbit | Output | Mini-Uart | RS-232 data output |
| RTS_n | Output | Mini-Uart | Request To Send (Active low) |
| CTS_n | Input | Mini-Uart | Clear To Send (Active low) |
| Bus_ADDR | Output | External Bus | Bus Address |
| Bus_DATA | inout | External Bus | Bus Data |
| Bus_RW | Output | External Bus | Bus READ/WRITE |
| Bus_CS | Output | External Bus | Bus Chip select |
| Bus_CLK | Output | External Bus | Clock |
| Timer_0 | Output | timer | 8 bit timer |
| Timer_1 | Output | timer | 8 bit timer |
| Sys_clk | Input | control unit | System Clock input |
| Reset_n | Input | control unit | This active low pin is used to reset the MCU to a known startup state by pulling RESET low. |
| LED | Output | control unit | Diagnostic LED Flasher |
| Bus_RESET | Output | External Bus | Reset external bus |
| portA (7:0) | Inout | I/O port | 8 software programmable I/O |
| portB (7:0) | Inout | I/O port | 8 software programmable I/O |
| portC (7:0) | Inout | I/O port | 8 software programmable I/O |
| portC (7:0) | Inout | I/O port | 8 software programmable I/O |
We will discuss each block as a separate topic including their Verilog code, simulation, testing and working .
The computer has two 8-bit, software-programmable counter. the timer0 is driven by a fixed divide-by-sixteen prescaler while timer1
is driven by a divide-by-sixty four prescaler . This timer can be used for many purposes, including input waveform measurements while simultaneously generating an output
waveform. Pulse widths can vary from several microseconds to many seconds.
The timer is set by turning on the timer chip select from the control unit, and updating the counter using data from the CPU. CPU_address 2:0 is used
to select between timer1, timer0 and the timer control register. A value of zero selects the timer control register , a value of
2 selects timer1 and a value of 3 selects timer0.
The key element in the programmable timer is a 24-bit, free-running counter or counter register, preceded by a prescaler that divides the internal processor clock by either
16 or 64 for timer0 and timer1 respectively. The counter is incremented during the low portion of the internal bus clock for timer0
and during the high portion of the internal bus clock for timer1. This gives the timer a resolution of 0.64nano seconds and 2.56nano seconds respectively. The operating system
clock if assumed to be 25Mhz., The timer clocks will be operating at :
Timer0 = 25,000 / 16= 1.562 MHz
Timer1 = 25,000 / 64 = 390 Khz
So, assume you want a pulse every 100 microseconds, with 25MHz system clock .then:
1/10-4 = 0.0001secs
1/0.0001 = 10,000Hz = 10KHz
(1.562 X 10^6)/(10^4) = 1.562 X 10^2 = 156.2 =approx.. 1001 1100
So the timer data_in will be fed with 10011100, with cs bit enables ,
While RW will be disabled(i.e Write mode) and the address bit should be 010 for timer0.
So a different calculation should be made for timer1.
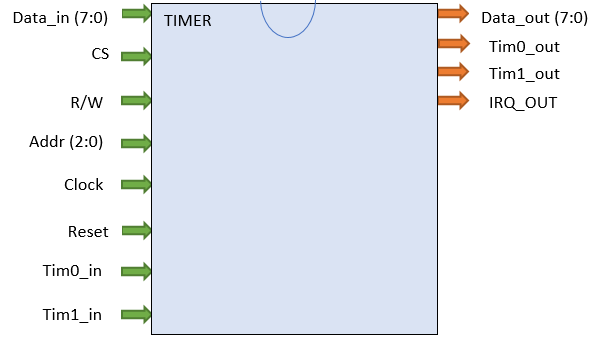
Pin description
| Pin | Port | Interface | Description |
|---|---|---|---|
| Data_out (7:0) | Output | Control unit | Register of the selected timer input |
| ADDR | Input | CPU . | Timer Address. |
| Tim0_out | Output | External Peripheral . | Output of timer1 |
| Tim1_out | Output | External Peripheral . | Output of timer2. |
| IRQ_OUT | Output | CPU. | Interrupt request which is bit1 of cpu_data_in
when CPU address selected is timer control register . |
| Tim0_in | Input | Control unit | Timer0 input |
| Tim1_in | Input | Control unit | Timer1 input |
| Reset | Input | cpu_reset | Reset |
| Clock | Input | cpu_clk | clock |
| R/W | Input | CPU | Read / Not Write |
| Timer_CS | Input | Control unit | indicates the chip selected for cpu data is the timer. |
| Data_in(7:0) | Input | CPU | Data Input from the CPU |
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity timer is port ( clk : in std_logic; rst : in std_logic; cs : in std_logic; rw : in std_logic; addr : in std_logic_vector(2 downto 0); data_in : in std_logic_vector(7 downto 0); data_out : out std_logic_vector(7 downto 0); irq_out : out std_logic; tim0_in : in std_logic; tim0_out : out std_logic; tim1_in : in std_logic; tim1_out : out std_logic ); end; architecture timer_arch of timer is signal timer_ctrl_reg : std_logic_vector(7 downto 0); signal timer0_reg : std_logic_vector(7 downto 0); signal timer1_reg : std_logic_vector(7 downto 0); signal count0 : std_logic_vector(7 downto 0); signal count1 : std_logic_vector(7 downto 0); begin -------------------------------- -- -- write control registers -- doesn't do anything yet -- -------------------------------- write_timer_control : process( clk, rst, cs, rw, addr, data_in, timer0_reg, timer1_reg, timer_ctrl_reg ) begin if clk'event and clk = '0' then if cs = '1' and rw = '0' then case addr is when "000" => timer_ctrl_reg <= data_in; timer0_reg <= timer0_reg; timer1_reg <= timer1_reg; when "010" => timer_ctrl_reg <= timer_ctrl_reg; timer0_reg <= data_in; timer1_reg <= timer1_reg; when "011" => timer_ctrl_reg <= timer_ctrl_reg; timer0_reg <= timer0_reg; timer1_reg <= data_in; when others => timer_ctrl_reg <= timer_ctrl_reg; timer0_reg <= timer0_reg; timer1_reg <= timer1_reg; end case; else timer_ctrl_reg <= timer_ctrl_reg; timer0_reg <= timer0_reg; timer1_reg <= timer1_reg; end if; end if; end process; read_timer_control : process( addr, timer_ctrl_reg, timer0_reg, timer1_reg, count0, count1 ) begin case addr is when "000" => data_out <= timer_ctrl_reg; when "010" => data_out <= timer0_reg; when "011" => data_out <= timer1_reg; when "110" => data_out <= count0; when "111" => data_out <= count1; when others => data_out <= "00000000"; end case; irq_out <= timer_ctrl_reg(0); end process; -------------------------------- -- -- counters -- -------------------------------- my_counter: process( clk, rst, count0, count1, tim0_in, tim1_in ) begin if rst = '1' then count0 <= "00000000"; elsif tim0_in'event and tim0_in = '0' then if count0 = timer0_reg then count0 <= "00000000"; else count0 <= count0 + 1; end if; end if; if rst = '1' then count1 <= "00000000"; elsif tim1_in'event and tim1_in = '1' then if count1 = timer1_reg then count1 <= "00000000"; else count1 <= count1 + 1; end if; end if; tim0_out <= count0(7); tim1_out <= count1(7); end process; end timer_arch;
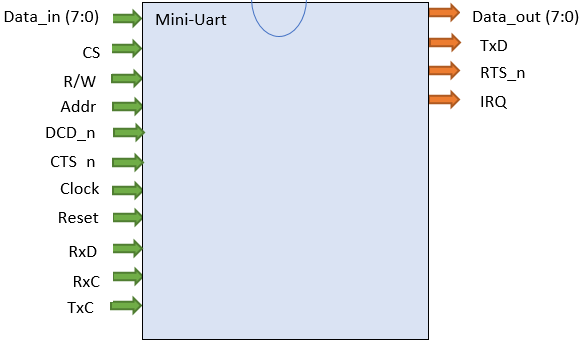
The Mini-UART is an interface built into the 6805soc which allows several communication between the SOC and any RS-232 enabled device example your PC.It is capable of sending parallel data through a serial line.
Features:

Bit description

RxIEnb bit
TxCtl bit
WdFmt bit => this bits is used for the configuration of the size and arrangement of bits to be transferred or received.
The UART consist of a receiver and a transmitter, which share a baud clock of 58 KBaud with BdCtl bit of 01 or 14KBaud for
BdCtl bit of 10. With our 25MHz System clock, the UART clock counter has a divide by 21 counter .which divides the system clock by :
25,000,000 / 27 = 926,000 KBaud when BdCtl bit is 00.
926,000 / 16 = 58 KBaud when BdCtl bit is 01.
Baud Rate Generator Clock Prescaling
BdCtl bit
Pin Description
| Pin | Type | Port | Description |
|---|---|---|---|
| Reset. | Input | cpu_reset | Reset input (active high) |
| Clock. | Input | cpu_clk | System Clock |
| CS. | Input | control unit | miniUART Chip Select |
| RW. | Input | CPU | Read / Not Write |
| IRQ. | Output | CPU | Interrupt |
| ADDR. | Input | CPU | Register Select |
| Data_in. | Input | CPU | Data Bus In |
| Data_out. | Input | Control unit | Data Bus Out |
| RxC. | Output | Control unit | Receive Baud Clock |
| TxC. | Input | Control unit | Transmit Baud Clock |
| RxD. | Input | RS-232 | Receive Data |
| TxD. | Output | RS-232 | Transmit Data |
| DCD_n. | Input | Control Unit | Data Carrier Detect (Active low) |
| CTS_n. | Input | RS-232 | Clear To Send (Active low) |
| RTS_n. | Output | RS-232 | Request To Send (Active low) |
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; ------------------------------------------------------------------------------- -- Receive unit ------------------------------------------------------------------------------- entity RxUnit is port ( Clk : in Std_Logic; -- Clock signal Reset : in Std_Logic; -- Reset input ReadD : in Std_Logic; -- Read data signal WdFmt : in Std_Logic_Vector(2 downto 0); -- word format BdFmt : in Std_Logic_Vector(1 downto 0); -- baud format RxClk : in Std_Logic; -- RS-232 clock input RxDat : in Std_Logic; -- RS-232 data input FRErr : out Std_Logic; -- Status signal ORErr : out Std_Logic; -- Status signal PAErr : out Std_logic; -- Status signal DARdy : out Std_Logic; -- Status signal DAOut : out Std_Logic_Vector(7 downto 0) ); end; --================== End of entity ==============================-- ------------------------------------------------------------------------------- -- Architecture for receive Unit ------------------------------------------------------------------------------- architecture Behaviour of RxUnit is ----------------------------------------------------------------------------- -- Signals ----------------------------------------------------------------------------- signal RxDebDel0 : Std_Logic; -- Debounce Delayed Rx Data signal RxDebDel1 : Std_Logic; -- Debounce Delayed Rx Data signal RxDebDel2 : Std_Logic; -- Debounce Delayed Rx Data signal RxDebDel3 : Std_Logic; -- Debounce Delayed Rx Data signal RxDeb : Std_Logic; -- Debounced Rx Data signal RxDatDel : Std_Logic; -- Delayed Rx Data signal RxDatEdge : Std_Logic; -- Rx Data Edge pulse signal RxClkDel : Std_Logic; -- Delayed Rx Input Clock signal RxClkEdge : Std_Logic; -- Rx Input Clock Edge pulse signal RxClkCnt : Std_Logic_Vector(5 downto 0); -- Rx Baud Clock Counter signal RxBdClk : Std_Logic; -- Rx Baud Clock signal RxBdDel : Std_Logic; -- Delayed Rx Baud Clock signal RxBdEdge : Std_Logic; -- Rx Baud Clock Edge pulse signal RxStart : Std_Logic; -- Rx Start bit detected signal tmpDRdy : Std_Logic; -- Data Ready flag signal RxValid : Std_Logic; -- Rx Data Valid signal tmpRxVal : Std_Logic; -- Rx Data Valid signal outErr : Std_Logic; -- Over run error bit signal frameErr : Std_Logic; -- Framing error bit signal ParityErr : Std_Logic; -- Parity Error Bit signal RxParity : Std_Logic; -- Calculated RX parity bit signal RxState : Std_Logic_Vector(3 downto 0); -- receive bit state signal ShtReg : Std_Logic_Vector(7 downto 0); -- Shift Register signal DataOut : Std_Logic_Vector(7 downto 0); -- Data Output register begin --------------------------------------------------------------------- -- Receiver Data Debounce -- Input level must be stable for 4 Receive Clock cycles. --------------------------------------------------------------------- rxunit_data_debounce : process(Clk, Reset, RxClkEdge, RxDat, RxDebDel0, RxDebDel1, RxDebDel2, RxDebDel3 ) begin if Reset = '1' then RxDebDel0 <= RxDat; RxDebDel1 <= RxDat; RxDebDel2 <= RxDat; RxDebDel3 <= RxDat; elsif Clk'event and Clk = '0' then if RxClkEdge = '1' then RxDebDel0 <= RxDat; RxDebDel1 <= RxDebDel0; RxDebDel2 <= RxDebDel1; RxDebDel3 <= RxDebDel2; if (RxDebDel3 or RxDebDel2 or RxDebDel1 or RxDebDel0) = '0' then RxDeb <= '0'; elsif (RxDebDel3 and RxDebDel2 and RxDebDel1 and RxDebDel0) = '1' then RxDeb <= '1'; else RxDeb <= RxDeb; end if; else RxDebDel0 <= RxDebDel0; RxDebDel1 <= RxDebDel1; RxDebDel2 <= RxDebDel2; RxDebDel3 <= RxDebDel3; RxDeb <= RxDeb; end if; end if; end process; --------------------------------------------------------------------- -- Receiver Data Edge Detection -- A falling edge will produce a one clock cycle pulse --------------------------------------------------------------------- rxunit_data_edge : process(Clk, Reset, RxDeb, RxDatDel ) begin if Reset = '1' then RxDatDel <= RxDeb; RxDatEdge <= '0'; elsif Clk'event and Clk = '0' then RxDatDel <= RxDeb; RxDatEdge <= RxDatDel and (not RxDeb); end if; end process; --------------------------------------------------------------------- -- Receiver Clock Edge Detection -- A rising edge will produce a one clock cycle pulse -- RxClock --------------------------------------------------------------------- rxunit_clock_edge : process(Clk, Reset, RxClk, RxClkDel ) begin if Reset = '1' then RxClkDel <= RxClk; RxClkEdge <= '0'; elsif Clk'event and Clk = '0' then RxClkDel <= RxClk; RxClkEdge <= RxClk and (not RxClkDel); end if; end process; --------------------------------------------------------------------- -- Receiver Clock Divider -- Reset the Rx Clock divider on any data edge -- Note that debounce data will be skewed by 4 clock cycles. -- Advance the count only on an input clock pulse --------------------------------------------------------------------- rxunit_clock_divide : process(Clk, Reset, RxDatEdge, RxState, RxStart, RxClkEdge, RxClkCnt ) begin if Reset = '1' then RxClkCnt <= "000000"; RxStart <= '0'; elsif Clk'event and Clk = '0' then if RxState = "1111" then -- idle state if RxStart = '0' then -- in hunt mode if RxDatEdge = '1' then -- falling edge starts counter RxStart <= '1'; else RxStart <= RxStart; -- other wise remain halted end if; else RxStart <= RxStart; -- Acquired start, stay in this state end if; else RxStart <= '0'; -- non idle, reset start flag end if; -- RxState if RxState = "1111" and RxStart = '0' then RxClkCnt <= "000011"; -- Reset to 3 to account for debounce skew else if RxClkEdge = '1' then RxClkCnt <= RxClkCnt + "000001"; else RxClkCnt <= RxClkCnt; end if; -- RxClkEdge end if; -- RxState end if; -- clk / reset end process; --------------------------------------------------------------------- -- Receiver Clock Selector -- Select output then look for rising edge --------------------------------------------------------------------- rxunit_clock_select : process(Clk, Reset, BdFmt, RxClk, RxClkCnt, RxBdDel, RxBdEdge ) begin -- BdFmt -- 0 0 - Baud Clk divide by 1 -- 0 1 - Baud Clk divide by 16 -- 1 0 - Baud Clk divide by 64 -- 1 1 - reset case BdFmt is when "00" => -- Div by 1 RxBdClk <= RxClk; when "01" => -- Div by 16 RxBdClk <= RxClkCnt(3); when "10" => -- Div by 64 RxBdClk <= RxClkCnt(5); when others => -- reset RxBdClk <= '0'; end case; if Reset = '1' then RxBdDel <= RxBdClk; RxBdEdge <= '0'; elsif Clk'event and Clk = '0' then RxBdDel <= RxBdClk; RxBdEdge <= RxBdClk and (not RxBdDel); end if; end process; --------------------------------------------------------------------- -- Receiver process --------------------------------------------------------------------- rxunit_receive : process(Clk, Reset, RxState, RxBdEdge, RxDat ) begin if Reset = '1' then frameErr <= '0'; outErr <= '0'; parityErr <= '0'; ShtReg <= "00000000"; -- Shift register DataOut <= "00000000"; RxParity <= '0'; -- Parity bit RxValid <= '0'; -- Data RX data valid flag RxState <= "1111"; elsif Clk'event and Clk='0' then if RxBdEdge = '1' then case RxState is when "0000" | "0001" | "0010" | "0011" | "0100" | "0101" | "0110" => -- data bits 0 to 6 ShtReg <= RxDat & ShtReg(7 downto 1); RxParity <= RxParity xor RxDat; parityErr <= parityErr; frameErr <= frameErr; outErr <= outErr; RxValid <= '0'; DataOut <= DataOut; if RxState = "0110" then if WdFmt(2) = '0' then RxState <= "1000"; -- 7 data + parity else RxState <= "0111"; -- 8 data bits end if; -- WdFmt(2) else RxState <= RxState + "0001"; end if; -- RxState when "0111" => -- data bit 7 ShtReg <= RxDat & ShtReg(7 downto 1); RxParity <= RxParity xor RxDat; parityErr <= parityErr; frameErr <= frameErr; outErr <= outErr; RxValid <= '0'; DataOut <= DataOut; if WdFmt(1) = '1' then -- parity bit ? RxState <= "1000"; -- yes, go to parity else RxState <= "1001"; -- no, must be 2 stop bit bits end if; when "1000" => -- parity bit if WdFmt(2) = '0' then ShtReg <= RxDat & ShtReg(7 downto 1); -- 7 data + parity else ShtReg <= ShtReg; -- 8 data + parity end if; RxParity <= RxParity; if WdFmt(0) = '0' then -- parity polarity ? if RxParity = RxDat then -- check even parity parityErr <= '1'; else parityErr <= '0'; end if; else if RxParity = RxDat then -- check for odd parity parityErr <= '0'; else parityErr <= '1'; end if; end if; frameErr <= frameErr; outErr <= outErr; RxValid <= '0'; DataOut <= DataOut; RxState <= "1001"; when "1001" => -- stop bit (Only one required for RX) ShtReg <= ShtReg; RxParity <= RxParity; parityErr <= parityErr; if RxDat = '1' then -- stop bit expected frameErr <= '0'; -- yes, no framing error else frameErr <= '1'; -- no, framing error end if; if tmpDRdy = '1' then -- Has previous data been read ? outErr <= '1'; -- no, overrun error else outErr <= '0'; -- yes, no over run error end if; RxValid <= '1'; DataOut <= ShtReg; RxState <= "1111"; when others => -- this is the idle state ShtReg <= ShtReg; RxParity <= RxParity; parityErr <= parityErr; frameErr <= frameErr; outErr <= outErr; RxValid <= '0'; DataOut <= DataOut; if RxDat = '0' then -- look for start request RxState <= "0000"; -- yes, read data else RxState <= "1111"; -- otherwise idle end if; end case; -- RxState else -- RxBdEdge ShtReg <= ShtReg; RxParity <= RxParity; parityErr <= parityErr; frameErr <= frameErr; outErr <= outErr; RxValid <= RxValid; DataOut <= DataOut; RxState <= RxState; end if; -- RxBdEdge end if; -- clk / reset end process; --------------------------------------------------------------------- -- Receiver Read process --------------------------------------------------------------------- rxunit_read : process(Clk, Reset, ReadD, RxValid, tmpRxVal, tmpDRdy ) begin if Reset = '1' then tmpDRdy <= '0'; tmpRxVal <= '0'; elsif Clk'event and Clk='0' then if ReadD = '1' then -- Data was read, reset data ready tmpDRdy <= '0'; tmpRxVal <= tmpRxVal; else if RxValid = '1' and tmpRxVal = '0' then -- Data was received, set Data ready tmpDRdy <= '1'; tmpRxVal <= '1'; else -- Test for falling edge of RxValid. tmpDRdy <= tmpDRdy; if RxValid = '0' and tmpRxVal = '1' then tmpRxVal <= '0'; else tmpRxVal <= tmpRxVal; end if; end if; -- RxValid end if; -- ReadD end if; -- clk / reset end process; DARdy <= tmpDRdy; DAOut <= DataOut; FRErr <= frameErr; ORErr <= outErr; PAErr <= parityErr; end Behaviour; --==================== End of architecture ====================--
library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; use ieee.std_logic_unsigned.all; ------------------------------------------------------------------------------- -- Transmitter unit ------------------------------------------------------------------------------- entity TxUnit is port ( Clk : in Std_Logic; -- Clock signal Reset : in Std_Logic; -- Reset input LoadD : in Std_Logic; -- Load transmit data DAIn : in Std_Logic_Vector(7 downto 0); WdFmt : in Std_Logic_Vector(2 downto 0); -- word format BdFmt : in Std_Logic_Vector(1 downto 0); -- baud format TxClk : in Std_Logic; -- Enable input TxDat : out Std_Logic; -- RS-232 data output TBE : out Std_Logic ); -- Tx buffer empty end; --================== End of entity ============================== ------------------------------------------------------------------------------- -- Architecture for TxUnit ------------------------------------------------------------------------------- architecture Behaviour of TxUnit is type TxStateType is ( TxIdle_State, Start_State, Data_State, Parity_State, Stop_State ); ----------------------------------------------------------------------------- -- Signals ----------------------------------------------------------------------------- signal TxClkDel : Std_Logic; -- Delayed Tx Input Clock signal TxClkEdge : Std_Logic; -- Tx Input Clock Edge pulse signal TxClkCnt : Std_Logic_Vector(5 downto 0); -- Tx Baud Clock Counter signal TxBdDel : Std_Logic; -- Delayed Tx Baud Clock signal TxBdEdge : Std_Logic; -- Tx Baud Clock Edge pulse signal TxBdClk : Std_Logic; -- Tx Baud Clock signal TBuff : Std_Logic_Vector(7 downto 0); -- transmit buffer signal TBufE : Std_Logic; -- Transmit Buffer Empty signal TReg : Std_Logic_Vector(7 downto 0); -- transmit register signal TxParity : Std_logic; -- Parity Bit signal DataCnt : Std_Logic_Vector(3 downto 0); -- Data Bit Counter signal TRegE : Std_Logic; -- Transmit Register empty signal TRegEDel : Std_Logic; -- Transmit Register empty signal TRegEEdge : Std_Logic; signal TxState : TxStateType; signal TxDbit : Std_Logic; begin --------------------------------------------------------------------- -- Transmit Clock Edge Detection -- A falling edge will produce a one clock cycle pulse --------------------------------------------------------------------- txunit_clock_edge : process(Clk, Reset, TxClk, TxClkDel ) begin if Reset = '1' then TxClkDel <= TxClk; TxClkEdge <= '0'; elsif Clk'event and Clk = '0' then TxClkDel <= TxClk; TxClkEdge <= TxClkDel and (not TxClk); end if; end process; --------------------------------------------------------------------- -- Transmit Clock Divider -- Advance the count only on an input clock pulse --------------------------------------------------------------------- txunit_clock_divide : process(Clk, Reset, TxClkEdge, TxClkCnt ) begin if Reset = '1' then TxClkCnt <= "000000"; elsif Clk'event and Clk = '0' then if TxClkEdge = '1' then TxClkCnt <= TxClkCnt + "000001"; else TxClkCnt <= TxClkCnt; end if; -- TxClkEdge end if; -- reset / clk end process; --------------------------------------------------------------------- -- Receiver Clock Selector -- Select output then look for rising edge --------------------------------------------------------------------- txunit_clock_select : process(Clk, Reset, BdFmt, TxClk, TxClkCnt, TxBdDel, TxBdEdge ) begin -- BdFmt -- 0 0 - Baud Clk divide by 1 -- 0 1 - Baud Clk divide by 16 -- 1 0 - Baud Clk divide by 64 -- 1 1 - reset case BdFmt is when "00" => -- Div by 1 TxBdClk <= TxClk; when "01" => -- Div by 16 TxBdClk <= TxClkCnt(3); when "10" => -- Div by 64 TxBdClk <= TxClkCnt(5); when others => -- reset TxBdClk <= '0'; end case; if Reset = '1' then TxBdDel <= TxBdClk; TxBdEdge <= '0'; elsif Clk'event and Clk = '0' then TxBdDel <= TxBdClk; TxBdEdge <= TxBdClk and (not TxBdDel); end if; end process; --------------------------------------------------------------------- -- Transmit Buffer Empty Edge -- generate a negative edge pulse --------------------------------------------------------------------- txunit_busy : process(Clk, Reset, TRegE, TRegEDel ) begin if Reset = '1' then TRegEDel <= '0'; TRegEEdge <= '0'; elsif Clk'event and Clk = '0' then TRegEDel <= TRegE; TRegEEdge <= TregEDel and (not TRegE ); -- falling edge end if; end process; --------------------------------------------------------------------- -- Transmitter activation process --------------------------------------------------------------------- txunit_write : process(Clk, Reset, LoadD, DAIn, TBufE, TRegEEdge ) begin if Reset = '1' then TBufE <= '1'; TBuff <= "00000000"; elsif Clk'event and Clk = '0' then if LoadD = '1' then TBuff <= DAIn; TBufE <= '0'; else TBuff <= TBuff; if (TBufE = '0') and (TRegEEdge = '1') then -- Once the transmitter is started -- We can flag the buffer empty again. TBufE <= '1'; else TBufE <= TBufE; end if; end if; end if; -- clk / reset TBE <= TBufE; end process; ----------------------------------------------------------------------------- -- Implements the Tx unit ----------------------------------------------------------------------------- txunit_transmit : process(Reset, Clk, TxState, TxDbit, TBuff, TReg, TxBdEdge, TxParity, DataCnt, WdFmt, TBufE, TRegE ) begin if Reset = '1' then TxDbit <= '1'; TReg <= "00000000"; TxParity <= '0'; DataCnt <= "0000"; TRegE <= '1'; TxState <= TxIdle_State; elsif Clk'event and Clk = '0' then if TxBdEdge = '1' then case TxState is when TxIdle_State => -- TxIdle_State (also 1st or 2nd Stop bit) TxDbit <= '1'; TReg <= TBuff; TxParity <= '0'; DataCnt <= "0000"; TRegE <= '1'; if TBufE = '0' then TxState <= Start_State; else TxState <= TxIdle_State; end if; when Start_State => TxDbit <= '0'; -- Start bit TReg <= TReg; TxParity <= '0'; if WdFmt(2) = '0' then DataCnt <= "0110"; -- 7 data + parity else DataCnt <= "0111"; -- 8 data end if; TRegE <= '0'; TxState <= Data_State; when Data_State => TxDbit <= TReg(0); TReg <= '1' & TReg(7 downto 1); TxParity <= TxParity xor TReg(0); TRegE <= '0'; DataCnt <= DataCnt - "0001"; if DataCnt = "0000" then if (WdFmt(2) = '1') and (WdFmt(1) = '0') then if WdFmt(0) = '0' then -- 8 data bits TxState <= Stop_State; -- 2 stops else TxState <= TxIdle_State; -- 1 stop end if; else TxState <= Parity_State; -- parity end if; else TxState <= Data_State; end if; when Parity_State => -- 7/8 data + parity bit if WdFmt(0) = '0' then TxDbit <= not( TxParity ); -- even parity else TXDbit <= TxParity; -- odd parity end if; Treg <= Treg; TxParity <= '0'; TRegE <= '0'; DataCnt <= "0000"; if WdFmt(1) = '0' then TxState <= Stop_State; -- 2 stops else TxState <= TxIdle_State; -- 1 stop end if; when Stop_State => -- first stop bit TxDbit <= '1'; -- 2 stop bits Treg <= Treg; TxParity <= '0'; DataCnt <= "0000"; TRegE <= '0'; TxState <= TxIdle_State; when others => -- Undefined TxDbit <= TxDbit; Treg <= Treg; TxParity <= '0'; DataCnt <= "0000"; TRegE <= TregE; TxState <= TxIdle_State; end case; -- TxState else -- TxBdEdge TxDbit <= TxDbit; TReg <= TReg; TxParity <= TxParity; DataCnt <= DataCnt; TRegE <= TRegE; TxState <= TxState; end if; -- TxBdEdge end if; -- clk / reset TxDat <= TxDbit; end process; end Behaviour; --=================== End of architecture ====================--
library ieee; use ieee.std_logic_1164.all; use ieee.numeric_std.all; entity miniUART is port ( -- -- CPU signals -- clk : in Std_Logic; -- System Clock rst : in Std_Logic; -- Reset input (active high) cs : in Std_Logic; -- miniUART Chip Select rw : in Std_Logic; -- Read / Not Write irq : out Std_Logic; -- Interrupt Addr : in Std_Logic; -- Register Select DataIn : in Std_Logic_Vector(7 downto 0); -- Data Bus In DataOut : out Std_Logic_Vector(7 downto 0); -- Data Bus Out -- -- Uart Signals -- RxC : in Std_Logic; -- Receive Baud Clock TxC : in Std_Logic; -- Transmit Baud Clock RxD : in Std_Logic; -- Receive Data TxD : out Std_Logic; -- Transmit Data DCD_n : in Std_Logic; -- Data Carrier Detect CTS_n : in Std_Logic; -- Clear To Send RTS_n : out Std_Logic ); -- Request To send end; --================== End of entity ==============================-- ------------------------------------------------------------------------------- -- Architecture for miniUART Controller Unit ------------------------------------------------------------------------------- architecture uart of miniUART is ----------------------------------------------------------------------------- -- Signals ----------------------------------------------------------------------------- signal RxData : Std_Logic_Vector(7 downto 0); -- signal TxData : Std_Logic_Vector(7 downto 0); -- signal StatReg : Std_Logic_Vector(7 downto 0); -- status register -- StatReg detailed -----------+--------+--------+--------+--------+--------+--------+--------+ -- Irq | PErr | ORErr | FErr | CTS | DCD | TBufE | DRdy | -----------+--------+--------+--------+--------+--------+--------+--------+ signal CtrlReg : Std_Logic_Vector(7 downto 0); -- control register -- CtrlReg detailed -----------+--------+--------+--------+--------+--------+--------+--------+ -- RxIEnb |TxCtl(1)|TxCtl(0)|WdFmt(2)|WdFmt(1)|WdFmt(0)|BdCtl(1)|BdCtl(0)| -----------+--------+--------+--------+--------+--------+--------+--------+ -- RxIEnb -- 0 - Rx Interrupt disabled -- 1 - Rx Interrupt enabled -- TxCtl -- 0 1 - Tx Interrupt Enable -- 1 0 - RTS high -- WdFmt -- 0 0 0 - 7 data, even parity, 2 stop -- 0 0 1 - 7 data, odd parity, 2 stop -- 0 1 0 - 7 data, even parity, 1 stop -- 0 1 1 - 7 data, odd parity, 1 stop -- 1 0 0 - 8 data, no parity, 2 stop -- 1 0 1 - 8 data, no parity, 1 stop -- 1 1 0 - 8 data, even parity, 1 stop -- 1 1 1 - 8 data, odd parity, 1 stop -- BdCtl -- 0 0 - Baud Clk divide by 1 -- 0 1 - Baud Clk divide by 16 -- 1 0 - Baud Clk divide by 64 -- 1 1 - reset signal TxDbit : Std_Logic; -- Transmit data bit signal DRdy : Std_Logic; -- Receive Data ready signal TBufE : Std_Logic; -- Transmit buffer empty signal FErr : Std_Logic; -- Frame error signal OErr : Std_Logic; -- Output error signal PErr : Std_Logic; -- Parity Error signal TxIEnb : Std_Logic; -- Transmit interrupt enable signal Read : Std_Logic; -- Read receive buffer signal Load : Std_Logic; -- Load transmit buffer signal ReadCS : Std_Logic; -- Read Status register signal LoadCS : Std_Logic; -- Load Control register signal Reset : Std_Logic; -- Reset (Software & Hardware) signal RxRst : Std_Logic; -- Receive Reset (Software & Hardware) signal TxRst : Std_Logic; -- Transmit Reset (Software & Hardware) signal DCDDel : Std_Logic; -- Delayed DCD_n signal DCDEdge : Std_Logic; -- Rising DCD_N Edge Pulse signal DCDState : Std_Logic; -- DCD Reset sequencer signal DCDInt : Std_Logic; -- DCD Interrupt ----------------------------------------------------------------------------- -- Receive Unit ----------------------------------------------------------------------------- component RxUnit port ( Clk : in Std_Logic; -- Clock signal Reset : in Std_Logic; -- Reset input ReadD : in Std_Logic; -- Read data signal WdFmt : in Std_Logic_Vector(2 downto 0); -- word format BdFmt : in Std_Logic_Vector(1 downto 0); -- baud format RxClk : in Std_Logic; -- RS-232 clock input RxDat : in Std_Logic; -- RS-232 data input FRErr : out Std_Logic; -- Status signal ORErr : out Std_Logic; -- Status signal PAErr : out Std_logic; -- Status signal DARdy : out Std_Logic; -- Status signal DAOut : out Std_Logic_Vector(7 downto 0)); end component; ----------------------------------------------------------------------------- -- Transmitter Unit ----------------------------------------------------------------------------- component TxUnit port ( Clk : in Std_Logic; -- Clock signal Reset : in Std_Logic; -- Reset input LoadD : in Std_Logic; -- Load transmit data DAIn : in Std_Logic_Vector(7 downto 0); WdFmt : in Std_Logic_Vector(2 downto 0); -- word format BdFmt : in Std_Logic_Vector(1 downto 0); -- baud format TxClk : in Std_Logic; -- Enable input TxDat : out Std_Logic; -- RS-232 data output TBE : out Std_Logic ); -- Tx buffer empty end component; begin ----------------------------------------------------------------------------- -- Instantiation of internal components ----------------------------------------------------------------------------- RxDev : RxUnit port map ( Clk => clk, Reset => RxRst, ReadD => Read, WdFmt => CtrlReg(4 downto 2), BdFmt => CtrlReg(1 downto 0), RxClk => RxC, RxDat => RxD, FRErr => FErr, ORErr => OErr, PAErr => PErr, DARdy => DRdy, DAOut => RxData ); TxDev : TxUnit port map ( Clk => clk, Reset => TxRst, LoadD => Load, DAIn => TxData, WdFmt => CtrlReg(4 downto 2), BdFmt => CtrlReg(1 downto 0), TxClk => TxC, TxDat => TxDbit, TBE => TBufE ); ----------------------------------------------------------------------------- -- Implements the controller for Rx&Tx units ----------------------------------------------------------------------------- miniUart_Status : process(clk, Reset, CtrlReg, TxIEnb, DRdy, TBufE, DCD_n, CTS_n, DCDInt, FErr, OErr, PErr ) variable Int : Std_Logic; begin if Reset = '1' then Int := '0'; StatReg <= "00000000"; irq <= '0'; elsif clk'event and clk='0' then Int := (CtrlReg(7) and DRdy) or (CtrlReg(7) and DCDInt) or (TxIEnb and TBufE); StatReg(0) <= DRdy; -- Receive Data Ready StatReg(1) <= TBufE and (not CTS_n); -- Transmit Buffer Empty StatReg(2) <= DCDInt; -- Data Carrier Detect StatReg(3) <= CTS_n; -- Clear To Send StatReg(4) <= FErr; -- Framing error StatReg(5) <= OErr; -- Overrun error StatReg(6) <= PErr; -- Parity error StatReg(7) <= Int; irq <= Int; end if; end process; ----------------------------------------------------------------------------- -- Transmit control ----------------------------------------------------------------------------- miniUart_TxControl : process( CtrlReg, TxDbit ) begin case CtrlReg(6 downto 5) is when "00" => -- Disable TX Interrupts, Assert RTS RTS_n <= '0'; TxIEnb <= '0'; TxD <= TxDbit; when "01" => -- Enable TX interrupts, Assert RTS RTS_n <= '0'; TxIEnb <= '1'; TxD <= TxDbit; when "10" => -- Disable Tx Interrupts, Clear RTS RTS_n <= '1'; TxIEnb <= '0'; TxD <= TxDbit; when "11" => -- Disable Tx interrupts, Assert RTS, send break RTS_n <= '0'; TxIEnb <= '0'; TxD <= '0'; when others => RTS_n <= '0'; TxIEnb <= '0'; TxD <= TxDbit; end case; end process; ----------------------------------------------------------------------------- -- Write to control register ----------------------------------------------------------------------------- miniUart_Control: process(clk, Reset, cs, rw, Addr, DataIn, CtrlReg, TxData ) begin if (reset = '1') then TxData <= "00000000"; Load <= '0'; Read <= '0'; CtrlReg <= "00000000"; LoadCS <= '0'; ReadCS <= '0'; elsif clk'event and clk='0' then if cs = '1' then if Addr = '1' then -- Data Register if rw = '0' then -- write data register TxData <= DataIn; Load <= '1'; Read <= '0'; else -- read Data Register TxData <= TxData; Load <= '0'; Read <= '1'; end if; -- rw CtrlReg <= CtrlReg; LoadCS <= '0'; ReadCS <= '0'; else -- Control / Status register TxData <= TxData; Load <= '0'; Read <= '0'; if rw = '0' then -- write control register CtrlReg <= DataIn; LoadCS <= '1'; ReadCS <= '0'; else -- read status Register CtrlReg <= CtrlReg; LoadCS <= '0'; ReadCS <= '1'; end if; -- rw end if; -- Addr else -- not selected TxData <= TxData; Load <= '0'; Read <= '0'; CtrlReg <= CtrlReg; LoadCS <= '0'; ReadCS <= '0'; end if; -- cs end if; -- clk / reset end process; --------------------------------------------------------------- -- -- set data output mux -- -------------------------------------------------------------- miniUart_data_read: process(Addr, StatReg, RxData) begin if Addr = '1' then DataOut <= RxData; -- read data register else DataOut <= StatReg; -- read status register end if; -- Addr end process; --------------------------------------------------------------- -- -- Data Carrier Detect Edge rising edge detect -- --------------------------------------------------------------- miniUart_DCD_edge : process( reset, clk, DCD_n, DCDDel ) begin if reset = '1' then DCDEdge <= '0'; DCDDel <= '0'; elsif clk'event and clk = '0' then DCDDel <= DCD_n; DCDEdge <= DCD_n and (not DCDDel); end if; end process; --------------------------------------------------------------- -- -- Data Carrier Detect Interrupt -- --------------------------------------------------------------- miniUart_DCD_int : process( reset, clk, DCDEdge, DCDState, Read, ReadCS, DCDInt ) begin if reset = '1' then DCDInt <= '0'; DCDState <= '0'; elsif clk'event and clk = '0' then if DCDEdge = '1' then DCDInt <= '1'; DCDState <= '0'; elsif DCDState = '0' then -- To reset DCD interrupt, First read status if (ReadCS <= '1') and (DCDInt = '1') then DCDState <= '1'; else DCDState <= '0'; end if; DCDInt <= DCDInt; else -- DCDstate = '1' -- Then read the data register if Read <= '1' then DCDState <= '0'; DCDInt <= '0'; else DCDState <= DCDState; DCDInt <= DCDInt; end if; end if; -- DCDState end if; -- clk / reset end process; --------------------------------------------------------------- -- -- reset may be hardware or software -- --------------------------------------------------------------- miniUart_reset: process(rst, CtrlReg, Reset, DCD_n ) begin Reset <= (CtrlReg(1) and CtrlReg(0)) or rst; TxRst <= Reset; RxRst <= Reset or DCD_n; end process; end; --===================== End of architecture =======================--
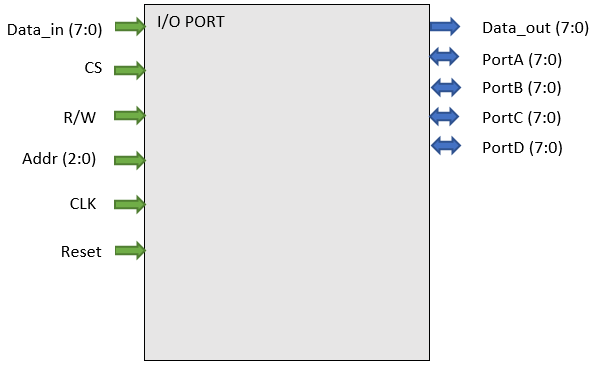
The 6805soc has four 8-bit input/output (I/O) ports.These 32 port pins are programmable as either inputs or outputs under software control of the data direction registers and they do not share any of their pins with other subsystems. To avoid a glitch on the output pins, write data to the I/O port data register before writing a 1 to the corresponding data direction register.
Port A
Port A is an 8-bit bidirectional port .The port A data register is at address 000 and the data direction register (DDR) is at address 100 of the CPU address.
Reset sets the data register to zero , but clears the data direction registers, thereby returning the ports to inputs. Writing a 1 to a DDR bit sets the corresponding port bit to output
mode.
Port B
Port B is an 8-bit bidirectional port .The port B data register is at address 001 and the data direction register (DDR) is at address 101 of the CPU address.
Reset sets the data register to zero , but clears the data direction registers, thereby returning the ports to inputs. Writing a 1 to a DDR bit sets the corresponding port bit to output
mode.
Port C
Port C is an 8-bit bidirectional port .The port C data register is at address 010 and the data direction register (DDR) is at address 110 of the CPU address.
Reset sets the data register to zero , but clears the data direction registers, thereby returning the ports to inputs. Writing a 1 to a DDR bit sets the corresponding port bit to output
mode.
Port D
Port D is an 8-bit bidirectional port .The port D data register is at address 011 and the data direction register (DDR) is at address 111 of the CPU address.
Reset sets the data register to zero , but clears the data direction registers, thereby returning the ports to inputs. Writing a 1 to a DDR bit sets the corresponding port bit to output
mode.
I/O port pins may be programmed as inputs or outputs under software control. The direction of the pins is determined by the state of the corresponding bit in the port data direction register (DDR). Each I/O port has an associated DDR. Any I/O port pin is configured as an output if its corresponding DDR bit is set to a logic 1. A pin is configured as an input if its corresponding DDR bit is cleared to a logic 0.
At power-on or reset, all DDRs are cleared, which configures all I/O pins as inputs. The data direction registers are capable of being written to or read by the processor. During the programmed output state, a read of the data register actually reads the value of the output data latch and not the I/O pin.
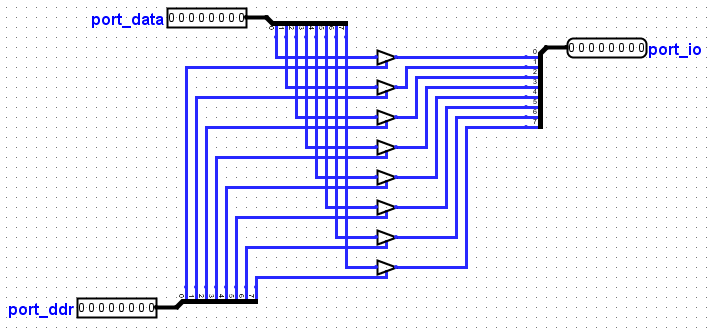
The diagram above shows, how the Port data direction register controls the I/O function of the port using a controlled buffer. See that the port individual bits can be
manipulated as input or output rather the whole port at once. Sending a 1 on any of the Port_ddr turns the port_data bit , thereby setting it as an output
to the port_io.
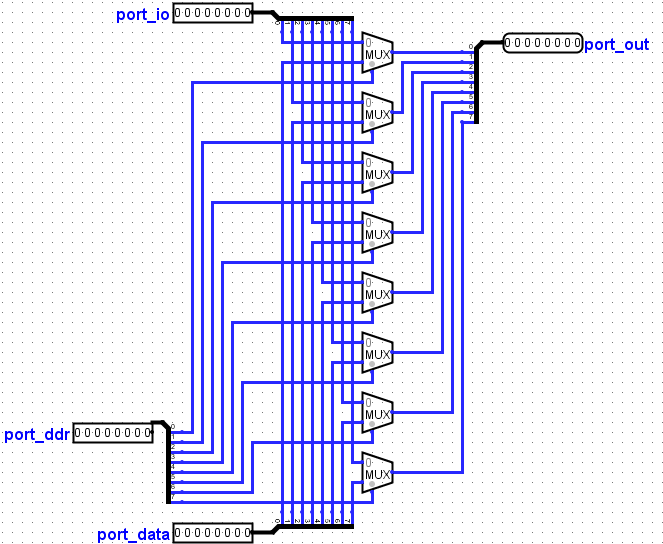
The diagram above show how the port_ddr selects between input data(port_io) and output data(port_data) as a valid port data(port_out). Selecting a
value of 1’ sets the selected multiplexer to allow the port_data bit which is the output data. When the port_ddr is set to zero,
the specific multiplexer allows the port_io which is the input data.
Pin Description
| Pin | Type | Interface | Description |
|---|---|---|---|
| Reset | Input | cpu_reset | Reset input (active high) |
| Clock | Input | cpu_clk | System Clock |
| CS | Input | control unit | I/O Chip Select |
| RW | Input | CPU | Read / Not Write |
| ADDR(2:0) | Input | CPU | Reset input (active high) |
| Data_in | Input | CPU | Data In |
| Data_out | Output | control unit | Data Out |
| PortA | Inout | External Peripheral | PortA Bidirectional I/O |
| PortB | Inout | External Peripheral | PortB Bidirectional I/O |
| PortC | Inout | External Peripheral | PortC Bidirectional I/O |
| PortD | Inout | External Peripheral | PortD Bidirectional I/O |
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity ioport is port ( clk : in std_logic; rst : in std_logic; cs : in std_logic; rw : in std_logic; addr : in std_logic_vector(2 downto 0); data_in : in std_logic_vector(7 downto 0); data_out : out std_logic_vector(7 downto 0); porta_io : inout std_logic_vector(7 downto 0); portb_io : inout std_logic_vector(7 downto 0); portc_io : inout std_logic_vector(7 downto 0); portd_io : inout std_logic_vector(7 downto 0) ); end; architecture ioport_arch of ioport is signal porta_ddr : std_logic_vector(7 downto 0); signal portb_ddr : std_logic_vector(7 downto 0); signal portc_ddr : std_logic_vector(7 downto 0); signal portd_ddr : std_logic_vector(7 downto 0); signal porta_data : std_logic_vector(7 downto 0); signal portb_data : std_logic_vector(7 downto 0); signal portc_data : std_logic_vector(7 downto 0); signal portd_data : std_logic_vector(7 downto 0); begin -------------------------------- -- -- read I/O port -- -------------------------------- ioport_read : process( addr, porta_ddr, portb_ddr, portc_ddr, portd_ddr, porta_data, portb_data, portc_data, portd_data, porta_io, portb_io, portc_io, portd_io ) variable count : integer; begin case addr is when "000" => for count in 0 to 7 loop if porta_ddr(count) = '1' then data_out(count) <= porta_data(count); else data_out(count) <= porta_io(count); end if; end loop; when "001" => for count in 0 to 7 loop if portb_ddr(count) = '1' then data_out(count) <= portb_data(count); else data_out(count) <= portb_io(count); end if; end loop; when "010" => for count in 0 to 7 loop if portc_ddr(count) = '1' then data_out(count) <= portc_data(count); else data_out(count) <= portc_io(count); end if; end loop; when "011" => for count in 0 to 7 loop if portd_ddr(count) = '1' then data_out(count) <= portd_data(count); else data_out(count) <= portd_io(count); end if; end loop; when "100" => data_out <= porta_ddr; when "101" => data_out <= portb_ddr; when "110" => data_out <= portc_ddr; when "111" => data_out <= portd_ddr; when others => data_out <= "00000000"; end case; end process; --------------------------------- -- -- Write I/O ports -- --------------------------------- ioport_write : process( clk, rst, addr, cs, rw, data_in, porta_data, portb_data, portc_data, portd_data, porta_ddr, portb_ddr, portc_ddr, portd_ddr ) begin if clk'event and clk = '0' then if rst = '1' then porta_data <= "00000000"; portb_data <= "00000000"; portc_data <= "00000000"; portd_data <= "00000000"; porta_ddr <= "00000000"; portb_ddr <= "00000000"; portc_ddr <= "00000000"; portd_ddr <= "00000000"; elsif cs = '1' and rw = '0' then case addr is when "000" => porta_data <= data_in; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; when "001" => porta_data <= porta_data; portb_data <= data_in; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; when "010" => porta_data <= porta_data; portb_data <= portb_data; portc_data <= data_in; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; when "011" => porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= data_in; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; when "100" => porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= data_in; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; when "101" => porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= data_in; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; when "110" => porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= data_in; portd_ddr <= portd_ddr; when "111" => porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= data_in; when others => porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; end case; else porta_data <= porta_data; portb_data <= portb_data; portc_data <= portc_data; portd_data <= portd_data; porta_ddr <= porta_ddr; portb_ddr <= portb_ddr; portc_ddr <= portc_ddr; portd_ddr <= portd_ddr; end if; end if; end process; --------------------------------- -- -- direction control port a -- --------------------------------- porta_direction : process ( porta_data, porta_ddr ) variable count : integer; begin for count in 0 to 7 loop if porta_ddr(count) = '1' then porta_io(count) <= porta_data(count); else porta_io(count) <= 'Z'; end if; end loop; end process; --------------------------------- -- -- direction control port b -- --------------------------------- portb_direction : process ( portb_data, portb_ddr ) variable count : integer; begin for count in 0 to 7 loop if portb_ddr(count) = '1' then portb_io(count) <= portb_data(count); else portb_io(count) <= 'Z'; end if; end loop; end process; --------------------------------- -- -- direction control port c -- --------------------------------- portc_direction : process ( portc_data, portc_ddr ) variable count : integer; begin for count in 0 to 7 loop if portc_ddr(count) = '1' then portc_io(count) <= portc_data(count); else portc_io(count) <= 'Z'; end if; end loop; end process; --------------------------------- -- -- direction control port d -- --------------------------------- portd_direction : process ( portd_data, portd_ddr ) variable count : integer; begin for count in 0 to 7 loop if portd_ddr(count) = '1' then portd_io(count) <= portd_data(count); else portd_io(count) <= 'Z'; end if; end loop; end process; end ioport_arch;
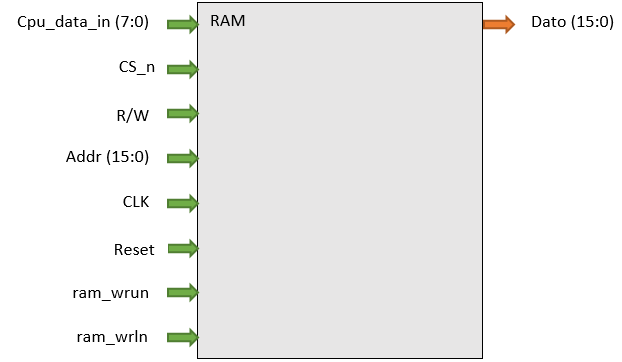
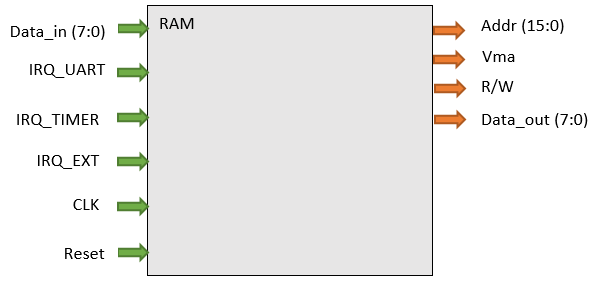
This computer has an 131 Kbytes memory map, consisting of a general purpose random-access memory (RAM) from address 0x0000 to 0xffff which can also be used for self-check ROM, user read-only memory (ROM) and input/output (I/O) registers.
To access the ram, the control unit needs to select the chip select of the ram while setting the appropriate signal for R/W, for either read or write. The data and
address needs to be set also. The ram_wru and ram_wrl enables the CPU to write to either the lower 8-bits or the upper 8-bits respectively.
Pin Description
| Pin | Type | Interface | Description |
|---|---|---|---|
| Reset | Input | cpu_reset | Reset input (active high) |
| Clock | Input | cpu_clk | System Clock |
| CS | Input | Control unit | Ram Chip Select |
| Cpu_data_in(7:0) | Input | Control unit | Ram data in |
| ram_wrun | Input | Control unit | Ram write to the upper 8bits (Active Low) |
| ram_wrln | Input | Control unit | Ram write to the lower 8bits (Active Low) |
| ADDR(15:0) | Input | Control unit | Ram Address |
| DATO(15:0) | Output | Control unit | Ram data out |
module eth_spram_256x32( clk, rst, ce, we, oe, addr, di, dato ); // // Generic synchronous single-port RAM interface // input clk; // Clock, rising edge input rst; // Reset, active high input cs_n; // Chip enable input, active high input ram_wrun; input ram_wrln; input [15:0] addr; // address bus inputs input [15:0] cpu_data; // input data bus output [15:0] dato; // output data bus // // Generic single-port synchronous RAM model // // // Generic RAM's registers and wires // reg [15: 0] mem0 [15:0]; // RAM content reg [15: 0] mem1; // RAM content reg [15:0] mem2; // RAM content wire cs_n_and_a; wire cs_n_and_b; wire wrn_wln; dato = mem0; assign cs_n_and_a = ram_wrun and not cs_n; assign cs_n_and_b = ram_wrln and not cs_n; assign wrn_wln = ram_wrun or ram_wrln always@(posedge clk, rst) if(rst) mem0 = 0; mem1 = 0; mem2 = 0; begin if (cs_n_and_a) mem2[15:8] <= cpu_data; else mem2 <= mem2[mem1][15:8]; if (cs_n_and_b) mem2[7:0] <= cpu_data; else mem2 <= mem2[mem1][7:0]; if (not cs_n) mem1 <= addr; else mem1 <= mem1; if (wrn_wln) mem0 <= mem2[mem1]; end endmodule
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_arith.all; use ieee.std_logic_unsigned.all; library work; -- use work.memory.all; entity boot_rom is port ( addr : in std_logic_vector(5 downto 0); data : out std_logic_vector(7 downto 0) ); end entity boot_rom; architecture basic of boot_rom is constant width : integer := 8; constant memsize : integer := 64; type rom_array is array(0 to memsize-1) of std_logic_vector(width-1 downto 0); constant rom_data : rom_array := ( "10011100", -- $FFC0 - 9C RESET RSP "10100110", "00010001", -- $FFC1 - A6 11 LDA #$11 "10110111", "00010000", -- $FFC3 - B7 10 STA ACIACS "10101110", "00000000", -- $FFC5 - AE 00 LDX #$00 "11010110", "11111111", "11100010", -- $FFC7 - D6 FFE2 LOOP0 LDA $FFE0,X "00100111", "00001000", -- $FFCA - 27 08 BEQ INPUT "00000011", "00010000", "11111101", -- $FFCC - 03 10 FD LOOP1 BRCLR 1,$10,LOOP1 "10110111", "00010001", -- $FFCF - B7 11 STA ACIADA "01011100", -- $FFD1 - 5C INCX "00100000", "11110011", -- $FFD3 - 20 F3 BRA LOOP0 "00000001", "00010000", "11111101", -- $FFD5 - 01 10 FD INPUT BRCLR 0,$10,INPUT "10110110", "00010001", -- $FFD7 - B6 11 LDA ACIADA "11001101", "11111111", "11011111", -- $FFD9 - CD FFDF JSR SUBR "11001100", "11111111", "11000000", -- $FFDC - CC FFC0 JMP RESET "10110111", "00010001", -- $FFDF - B7 11 SUBR STA ACIADA "10000001", -- $FFE1 - 81 RTS "01001000", "01100101", "01101100", -- $FFE2 - 48 65 6c MSG FCC "Hel" "01101100", "01101111", "00100000", -- $FFE5 - 6c 6f 20 FCC "lo " "01010111", "01101111", "01110010", -- $FFE8 - 57 6f 72 FCC "Wor" "01101100", "01100100", -- $FFEB - 6c 64 FCC "ld" "00001010", "00001101", "00000000", -- $FFED - 0a 0d 00 FCB LF,CR,NULL "11111111", "11000000", -- $FFF0 - FF C0 FDB RESET "11111111", "11000000", -- $FFF2 - FF C0 FDB RESET "11111111", "11000000", -- $FFF4 - FF C0 FDB RESET "11111111", "11000000", -- $FFF6 - FF C0 FDB RESET "11111111", "11000000", -- $FFF8 - FF C0 FDB RESET "11111111", "11000000", -- $FFFA - FF C0 FDB RESET "11111111", "11000000", -- $FFFC - FF C0 FDB RESET "11111111", "11000000" -- $FFFE - FF C0 FDB RESET ); begin data <= rom_data(conv_integer(addr)); end architecture basic;
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_arith.all; use ieee.std_logic_unsigned.all; entity bset_rom is port ( addr : in std_logic_vector(2 downto 0); data : out std_logic_vector(7 downto 0) ); end entity bset_rom; architecture basic of bset_rom is constant width : integer := 8; constant memsize : integer := 8; type bset_rom_array is array(0 to memsize-1) of std_logic_vector(width-1 downto 0); constant bset_rom_data : bset_rom_array := ( "00000001", "00000010", "00000100", "00001000", "00010000", "00100000", "01000000", "10000000" ); begin data <= bset_rom_data(conv_integer(addr)); end architecture basic;
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_arith.all; use ieee.std_logic_unsigned.all; entity bclr_rom is port ( addr : in std_logic_vector(2 downto 0); data : out std_logic_vector(7 downto 0) ); end entity bclr_rom; architecture basic of bclr_rom is constant width : integer := 8; constant memsize : integer := 8; type bclr_rom_array is array(0 to memsize-1) of std_logic_vector(width-1 downto 0); constant bclr_rom_data : bclr_rom_array := ( "11111110", "11111101", "11111011", "11110111", "11101111", "11011111", "10111111", "01111111" ); begin data <= bclr_rom_data(conv_integer(addr)); end architecture basic;
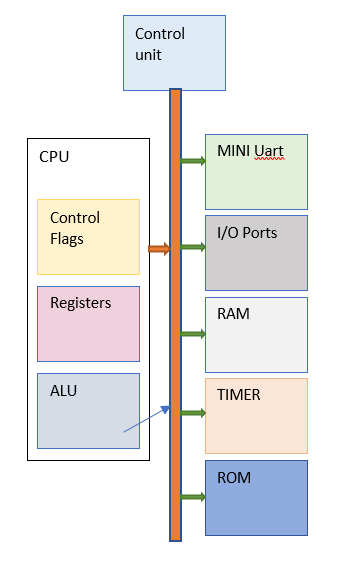
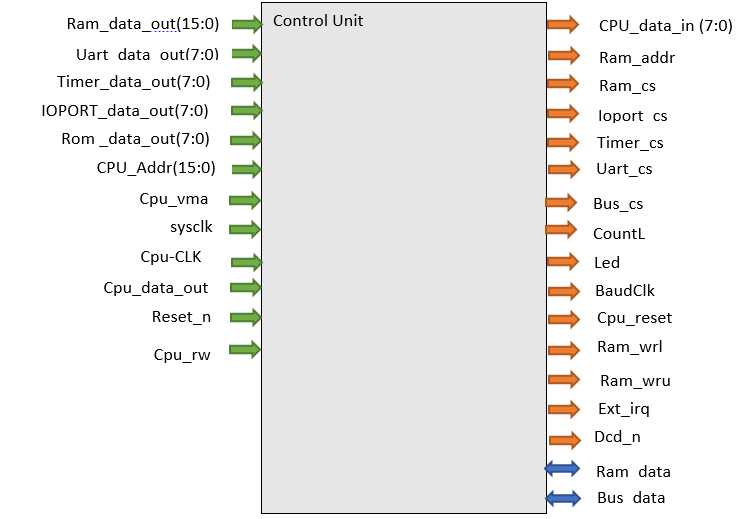
the control unit is a communication link used by the CPU to send data, control signal and address to all the peripherial devices that are contained within the computer. It serves as a medium between the cpu and the rest of the computer. The CPU transmits a variety of control signals to components and devices, One of the main objectives of a bus is to minimize the lines that are needed for communication.
The cpu sends and receives data from the control unit through the data_out and cpu_data_in signal lines respectively. This signals are sent and received
from all the peripheral devices, depending on the specific address the cpu wants to communicate with.
The control unit selects this address from signals in Rom, Ram, Timer, Uart, Ioport.
Each peripheral has a specific address on the cpu_address bus. The cpu_vma when enabled indicates that there is a valid address and the cpu wants to
communicate with the peripheral.
Pin Description
| Pin | Type | Interface | Description |
|---|---|---|---|
| Reset | Input | cpu_reset | Reset input (active high) |
| Cpu_clk | Input | cpu_clk | System Clock |
| Uart_data_out | Input | Mini-uart | Output data from the UART |
| Timer_data_out | Input | timer | Output data from the Timer |
| Ioport_data_out | Input | ioport | Output data from the IOPORT |
| Rom_data_out | Input | Rom | Output data from the ROM |
| Ram_data | Inout | Ram | data to/from the RAM |
| Bus_data | Inout | Bus | data to/from the BUS |
| CPU_addr | Input | CPU | CPU Address |
| CPU_Vma | Input | CPU | Valid Memory Address |
| CPU_Data_out | Input | CPU | Data output from the CPU |
| Sysclk | Input | CPU | Clock for timer |
| Cpu_rw | Input | CPU | System Clock |
| Cpu_data_in | output | control unit | Cpu data to all peripheral |
| Ram_ADDR | output | Ram | Ram address |
| Baudclock | output | mini-uart | Miniuart RX/TX Clock |
| Ioport_cs | output | ioport | IOPORT Chip Select |
| Ram_cs | output | ram | Ram Chip Select |
| Timer_cs | output | timer | Timer chip select |
| Uart_cs | output | mini-uart | Mini-uart chip select |
| Bus_cs | output | control unit | Bus Chip Select |
| Count_L | output | Timer | Generates Timer clock |
| Led | output | Out | Indicates circuit is working |
| Ram_wrl | output | ram | Ram write lower(writes to bit 7:0 of ram address) |
| Ram_wru | output | ram | Ram write Upper(writes to bit 15:8 of ram address) |
| Ext_irq | output | cpu | Interrupt |
| Dcd_n | output | mini-uart | For Debugging |
library ieee; use ieee.std_logic_1164.all; use IEEE.STD_LOGIC_ARITH.ALL; use IEEE.STD_LOGIC_UNSIGNED.ALL; use ieee.numeric_std.all; entity System05 is port( SysClk : in Std_Logic; -- System Clock input Reset_n : in Std_logic; -- Master Reset input (active low) LED : out std_logic; -- Diagnostic LED Flasher -- Memory Interface signals ram_csn : out Std_Logic; ram_wrun : out Std_Logic; ram_wrln : out Std_Logic; ram_addr : out Std_Logic_Vector(16 downto 0); ram_data : inout Std_Logic_Vector(15 downto 0); -- Stuff on the peripheral board -- aux_clock : in Std_Logic; -- Extra clock -- buzzer : out Std_Logic; -- PS/2 Mouse interface -- mouse_clock : in Std_Logic; -- mouse_data : in Std_Logic; -- Uart Interface rxbit : in Std_Logic; txbit : out Std_Logic; rts_n : out Std_Logic; cts_n : in Std_Logic; -- Keyboard interface -- kb_clock : in Std_Logic; -- kb_data : in Std_Logic; -- CRTC output signals -- v_drive : out Std_Logic; -- h_drive : out Std_Logic; -- blue_lo : out std_logic; -- blue_hi : out std_logic; -- green_lo : out std_logic; -- green_hi : out std_logic; -- red_lo : out std_logic; -- red_hi : out std_logic; -- External Bus bus_addr : out std_logic_vector(15 downto 0); bus_data : inout std_logic_vector(7 downto 0); bus_rw : out std_logic; bus_cs : out std_logic; bus_clk : out std_logic; bus_reset : out std_logic; -- I/O Ports porta : inout std_logic_vector(7 downto 0); portb : inout std_logic_vector(7 downto 0); portc : inout std_logic_vector(7 downto 0); portd : inout std_logic_vector(7 downto 0); -- Timer I/O -- timer0_in : in std_logic; timer0_out : out std_logic; -- timer1_in : in std_logic; timer1_out : out std_logic ); end System05; ------------------------------------------------------------------------------- -- Architecture for memio Controller Unit ------------------------------------------------------------------------------- architecture my_computer of System05 is ----------------------------------------------------------------------------- -- Signals ----------------------------------------------------------------------------- -- BOOT ROM signal rom_data_out : Std_Logic_Vector(7 downto 0); -- UART Interface signals signal uart_data_out : Std_Logic_Vector(7 downto 0); signal uart_cs : Std_Logic; signal uart_irq : Std_Logic; signal dcd_n : Std_Logic; -- I/O Port signal ioport_data_out : std_logic_vector(7 downto 0); signal ioport_cs : std_logic; -- Timer I/O signal timer_data_out : std_logic_vector(7 downto 0); signal timer_cs : std_logic; signal timer_irq : Std_Logic; -- RAM signal ram_cs : std_logic; -- memory chip select signal ram_wrl : std_logic; -- memory write lower signal ram_wru : std_logic; -- memory write upper signal ram_data_out : std_logic_vector(7 downto 0); -- Sequencer Interface signals signal cpu_reset : Std_Logic; signal cpu_clk : Std_Logic; signal cpu_rw : std_logic; signal cpu_vma : std_logic; signal cpu_addr : Std_Logic_Vector(15 downto 0); signal cpu_data_in : Std_Logic_Vector(7 downto 0); signal cpu_data_out: Std_Logic_Vector(7 downto 0); -- External interrupt input signal ext_irq : Std_Logic; -- Counter signals signal countL : std_logic_vector(23 downto 0); signal BaudCount : std_logic_vector(4 downto 0); signal baudclk : Std_Logic; ----------------------------------------------------------------- -- -- CPU Core -- ----------------------------------------------------------------- component cpu05 is port ( clk : in std_logic; rst : in std_logic; vma : out std_logic; rw : out std_logic; addr : out std_logic_vector(15 downto 0); data_in : in std_logic_vector(7 downto 0); data_out : out std_logic_vector(7 downto 0); irq_ext : in std_logic; irq_timer : in std_logic; irq_uart : in std_logic ); end component cpu05; ------------------------------------------ -- -- Program memory -- ------------------------------------------ component boot_rom is port ( addr : in Std_Logic_Vector(5 downto 0); -- 64 byte boot rom data : out Std_Logic_Vector(7 downto 0) ); end component boot_rom; ----------------------------------------------------------------- -- -- Open Cores Mini UART -- ----------------------------------------------------------------- component miniUART port ( clk : in Std_Logic; -- System Clock rst : in Std_Logic; -- Reset input (active high) cs : in Std_Logic; -- miniUART Chip Select rw : in Std_Logic; -- Read / Not Write irq : out Std_Logic; -- Interrupt Addr : in Std_Logic; -- Register Select DataIn : in Std_Logic_Vector(7 downto 0); -- Data Bus In DataOut : out Std_Logic_Vector(7 downto 0); -- Data Bus Out RxC : in Std_Logic; -- Receive Baud Clock TxC : in Std_Logic; -- Transmit Baud Clock RxD : in Std_Logic; -- Receive Data TxD : out Std_Logic; -- Transmit Data DCD_n : in Std_Logic; -- Data Carrier Detect CTS_n : in Std_Logic; -- Clear To Send RTS_n : out Std_Logic ); -- Request To send end component; --------------------------------------- -- -- Three port parallel I/O -- --------------------------------------- component ioport is port ( clk : in std_logic; rst : in std_logic; cs : in std_logic; rw : in std_logic; addr : in std_logic_vector(2 downto 0); data_in : in std_logic_vector(7 downto 0); data_out : out std_logic_vector(7 downto 0); porta_io : inout std_logic_vector(7 downto 0); portb_io : inout std_logic_vector(7 downto 0); portc_io : inout std_logic_vector(7 downto 0); portd_io : inout std_logic_vector(7 downto 0) ); end component; ---------------------------------------- -- -- Timer module -- ---------------------------------------- component timer is port ( clk : in std_logic; rst : in std_logic; cs : in std_logic; rw : in std_logic; addr : in std_logic_vector(2 downto 0); data_in : in std_logic_vector(7 downto 0); data_out : out std_logic_vector(7 downto 0); irq_out : out std_logic; tim0_in : in std_logic; tim0_out : out std_logic; tim1_in : in std_logic; tim1_out : out std_logic ); end component; ------------------------------------------ -- -- Global clock buffer for debug -- ------------------------------------------ component BUFG is port ( i: in std_logic; o: out std_logic ); end component; begin ----------------------------------------------------------------------------- -- Instantiation of internal components ----------------------------------------------------------------------------- my_cpu : cpu05 port map ( clk => cpu_clk, rst => cpu_reset, vma => cpu_vma, rw => cpu_rw, addr => cpu_addr(15 downto 0), data_in => cpu_data_in, data_out => cpu_data_out, irq_ext => ext_irq, irq_timer => timer_irq, irq_uart => uart_irq ); rom : boot_rom port map ( addr => cpu_addr(5 downto 0), data => rom_data_out ); my_uart : miniUART port map ( clk => cpu_clk, rst => cpu_reset, cs => uart_cs, rw => cpu_rw, irq => uart_irq, Addr => cpu_addr(0), Datain => cpu_data_out, DataOut => uart_data_out, RxC => baudclk, TxC => baudclk, RxD => rxbit, TxD => txbit, DCD_n => dcd_n, CTS_n => cts_n, RTS_n => rts_n ); my_ioport : ioport port map ( clk => cpu_clk, rst => cpu_reset, cs => ioport_cs, rw => cpu_rw, addr => cpu_addr(2 downto 0), data_in => cpu_data_out, data_out => ioport_data_out, porta_io => porta, portb_io => portb, portc_io => portc, portd_io => portd ); my_timer : timer port map ( clk => cpu_clk, rst => cpu_reset, cs => timer_cs, rw => cpu_rw, addr => cpu_addr(2 downto 0), data_in => cpu_data_out, data_out => timer_data_out, irq_out => timer_irq, tim0_in => CountL(4), tim0_out => timer0_out, tim1_in => CountL(6), tim1_out => timer1_out ); bufginst: BUFG port map( i => countL(0), o => cpu_clk ); -- bufginst: BUFG port map(i => SysClk, o => cpu_clk ); ---------------------------------------------------------------------- -- -- Processes to read and write memory based on bus signals -- ---------------------------------------------------------------------- memory_decode: process( Reset_n, cpu_clk, cpu_addr, cpu_vma, rom_data_out, ram_data_out, ioport_data_out, timer_data_out, uart_data_out, bus_data ) begin case cpu_addr(15 downto 6) is when "1111111111" => cpu_data_in <= rom_data_out; ram_cs <= '0'; ioport_cs <= '0'; timer_cs <= '0'; uart_cs <= '0'; bus_cs <= '0'; when "0000000000" => -- -- Decode 64 bytes of I/O space here -- ram_cs <= '0'; case cpu_addr(5 downto 3) is -- -- I/O ports $0000 - $0007 -- when "000" => cpu_data_in <= ioport_data_out; ioport_cs <= cpu_vma; timer_cs <= '0'; uart_cs <= '0'; bus_cs <= '0'; -- -- Timer $0008 - $000F -- when "001" => cpu_data_in <= timer_data_out; ioport_cs <= '0'; timer_cs <= cpu_vma; uart_cs <= '0'; bus_cs <= '0'; -- -- ACIA $0010 - $0017 -- when "010" => cpu_data_in <= uart_data_out; ioport_cs <= '0'; timer_cs <= '0'; uart_cs <= cpu_vma; bus_cs <= '0'; -- -- Reserved $0018 - $003F -- when others => cpu_data_in <= bus_data; ioport_cs <= '0'; timer_cs <= '0'; uart_cs <= '0'; bus_cs <= cpu_vma; end case; when others => cpu_data_in <= ram_data_out; ram_cs <= cpu_vma; ioport_cs <= '0'; timer_cs <= '0'; uart_cs <= '0'; bus_cs <= '0'; end case; end process; -------------------------------------------------------------- -- -- B5 SRAM interface -- -------------------------------------------------------------- Ram_decode: process( Reset_n, cpu_clk, cpu_addr, cpu_rw, cpu_vma, cpu_data_out, ram_cs, ram_wrl, ram_wru, ram_data ) begin cpu_reset <= not Reset_n; ram_wrl <= (not cpu_rw) and cpu_addr(0); ram_wru <= (not cpu_rw) and (not cpu_addr(0)); ram_wrln <= not ram_wrl; ram_wrun <= not ram_wru; ram_csn <= not( Reset_n and ram_cs and cpu_clk ); ram_addr(16 downto 15) <= "00"; ram_addr(14 downto 0) <= cpu_addr(15 downto 1); if ram_cs = '1' then if ram_wrl = '1' then ram_data(7 downto 0) <= cpu_data_out; else ram_data(7 downto 0) <= "ZZZZZZZZ"; end if; if ram_wru = '1' then ram_data(15 downto 8) <= cpu_data_out; else ram_data(15 downto 8) <= "ZZZZZZZZ"; end if; else ram_data(7 downto 0) <= "ZZZZZZZZ"; ram_data(15 downto 8) <= "ZZZZZZZZ"; end if; if cpu_addr(0) = '0' then ram_data_out(7 downto 0) <= ram_data(15 downto 8); else ram_data_out(7 downto 0) <= ram_data(7 downto 0); end if; end process; -- -- CPU bus signals -- my_bus : process( cpu_clk, cpu_reset, cpu_rw, cpu_addr, cpu_data_out ) begin bus_clk <= cpu_clk; bus_reset <= cpu_reset; bus_rw <= cpu_rw; bus_addr <= cpu_addr; if( cpu_rw = '1' ) then bus_data <= "ZZZZZZZZ"; else bus_data <= cpu_data_out; end if; end process; -- -- flash led to indicate code is working -- blink: process (SysClk, CountL ) begin if(SysClk'event and SysClk = '0') then countL <= countL + 1; end if; LED <= countL(21); end process; -- -- 57.6 Kbaud * 16 divider for 25 MHz system clock -- my_baud_clock: process( SysClk ) begin if(SysClk'event and SysClk = '0') then if( BaudCount = 26 ) then BaudCount <= "00000"; else BaudCount <= BaudCount + 1; end if; end if; baudclk <= BaudCount(4); -- 25MHz / 27 = 926,000 KHz = 57,870Bd * 16 dcd_n <= '0'; end process; -- -- tie down inputs and outputs -- -- CRTC output signals -- -- v_drive <= '0'; -- h_drive <= '0'; -- blue_lo <= '0'; -- blue_hi <= '0'; -- green_lo <= '0'; -- green_hi <= '0'; -- red_lo <= '0'; -- red_hi <= '0'; -- buzzer <= '0'; -- -- tie down unused interrupts -- ext_irq <= '0'; end my_computer; --===================== End of architecture =======================--
The CPU(Central Processing Unit) is made up of the ALU, flags and Control Registers.
ALU:
the Alu_ctrl signal is responsible for controlling the operation of the ALU. Each value of the alu_ctrl signal represents a different
alu operation. The ALU has a total of 27 instructions, with two registers , the alu_left and the alu_right. And ALU_v
as the output.
Instruction Types
The MCU instructions fall into the following four categories:
1. Register/Memory Instructions
These instructions operate on CPU registers and memory locations. Most of them use two operands. One operand is in either the accumulator or the index register.
The CPU finds the other operand in memory.
| Alu_ctrl signal | Mneumonics | Instruction |
|---|---|---|
| 00000 | Alu_add | Add Memory Byte to Accumulator |
| 00001 | Alu_adc | Add Memory Byte and Carry Bit to Accumulator |
| 00010 | Alu_sub | Subtract Memory Byte from Accumulator |
| 00011 | Alu_sbc | Subtract Memory Byte and Carry Bit from Accumulator |
| 00100 | Alu_and | AND Memory Byte with Accumulator |
| 00101 | Alu_ora | OR Accumulator with Memory Byte |
| 00110 | Alu_eor | EXCLUSIVE OR Accumulator with Memory Byte |
| 11000 | Alu_ld | Load Accumulator/Index Register with Memory Byte |
| 11001 | Alu_st | Store accumulator/Index Register in Memory |
| 10111 | Alu_btst | Test for Negative or Zero |
2. Read-Modify-Write Instructions
These instructions read a memory location or a register, modify its contents, and write the modified value back to the memory location or to the register.
Note :
| Alu_ctrl signal | Mneumonics | Instruction |
|---|---|---|
| 00111 | Alu_tst | Test for Negative or Zero |
| 01000 | Alu_inc | Increment |
| 01001 | Alu_dec | Decrement |
| 01010 | Alu_clr | Clear Register |
| 01011 | Alu_neg | Negate (Two’s Complement) |
| 01100 | Alu_com | Complement (One’s Complement) |
| 01101 | Alu_lsr | Logical Shift Right |
| 01110 | Alu_lsl | Logical Shift Left (Same as ASL) |
| 01111 | Alu_ror | Rotate Right through Carry Bit |
| 10000 | Alu_rol | Rotate Left through Carry Bit |
| 10001 | Alu_asr | Arithmetic Shift Right |
| 10101 | Alu_bset | Bit Set |
| 10110 | Alu_bclr | Bit Clear |
3. Bit Manipulation Instructions
The CPU can set or clear any writable bit in the first 256 bytes of memory, which includes I/O registers and on-chip RAM locations.
| Alu_ctrl signal | Mneumonics | Instruction |
|---|---|---|
| 10101 | Alu_bset | Bit Set |
| 10110 | Alu_bclr | Bit Clear |
4. Control Instructions
These instructions act on CPU registers and control CPU operation during program execution.
Pin Description
| Alu_ctrl signal | Mneumonics | Instruction |
|---|---|---|
| 10010 | Alu_sei | Set Interrupt mask |
| 10011 | Alu_cli | Clear interrupt mask |
| 10100 | Alu_clc | Clear carry bit |
| 11010 | Alu_nop | No Operation |
| 11011 | Alu_sec | Set carry bit |
The cpu has 15 registers:
Accumulator (ACR)
The accumulator (A) is a general-purpose 8-bit register used to hold operands and results of arithmetic calculations or data manipulations.
The accumulator output is either fed as the cpu data out or fed to the alu_register. The accumulator register is control by the ac_ctrl signal. It has four
addressing modes:

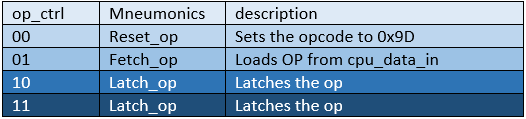
Opcode register (OPR):
stores the opcode , the opcode or operation code affects the operation of the cpu the table will be drawn in instruction cycle section.
It also contains the address of the bset and bclr data roms. Its output is controlled by the op_ctrl bit. And it has its input
fed in directly from the cpu data_in. it has four addressing modes:
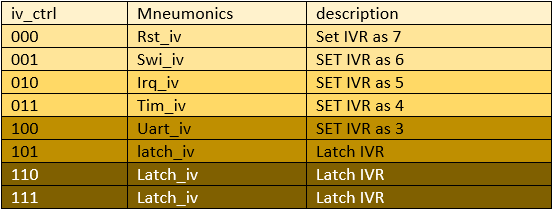
Interrupt vector register: (IVR):
This register is controlled by the iv_ctrl and it has 6 address modes:
Index Register (IXR)
The index register (IXR) is an 8-bit register used by the indexed addressing value to create an effective address. The index register also may be used as a
temporary storage area.It can either be fed to the cpu_data_out or to the alu register. It is controlled by the ix_ctrl signal,
and it has four addressing modes:

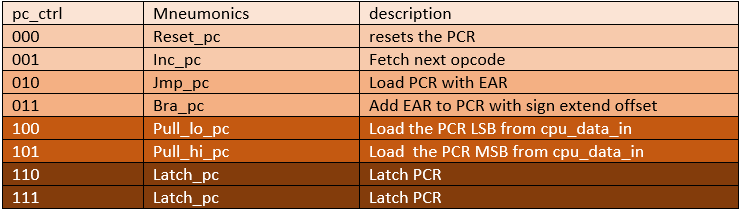
Program Counter (PCR):
The program counter (PC) is a 16-bit register that points to the next program address, it is controlled by the pc_ctrl
and it has seven addressing modes:
Memory data Register (MDR):
JUST like the IXR and ACR the memory data register also stores program data, which can be fed to the alu_register or fed as
the cpu_data_out. The MDR is controlled by the md_ctrl signal and it has four address mode:

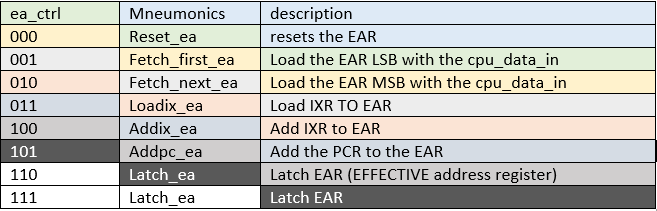
effective address register (EAR):
This register stores the unique address that the program counter use, it can be used during a jump subroutine or when the program needs to perform a particular
cycle outside the program counter. It is controlled by the ea_ctrl. It has 7 addressing modes:
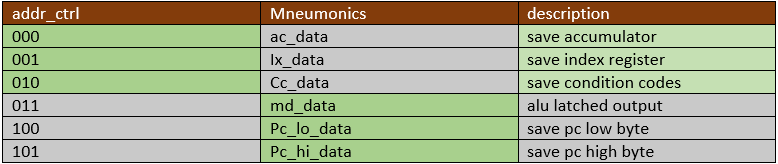
Data Output register (DMR)
Also called the Data Output Multiplexer, this register selects what to output as the cpu_output. That is select data to be written to memory,
note that that the output is asynchronous. This register is controlled by the data_ctrl bit , and it has five address mode:
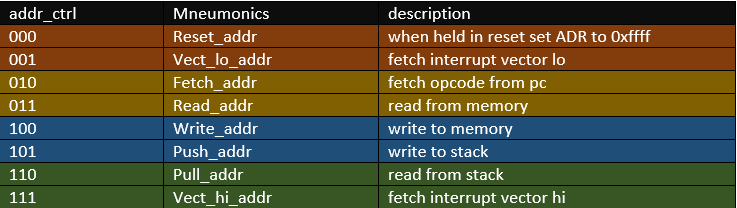
Address register ( ADR, VMA, RW):
Stores the address of the peripheral device the cpu wants to communicate with, it is controlled by the addr_ctrl register. It also controls the RW
and the VMA . the vma stands for valid memory access it indicates that the address bus data is valid, this signal is always on except when the address register
is reset or when the address register is fetching the interrupt vector hi signal. The RW when high indicates that the CPU wants to read , while low it indicates
that the cpu wants to write, the cpu is always in the read mode except when it wants to write to the stack or the memory. the addr_ctrl register has six
addressing modes:
Alu register (ALR, ARR):
The alu_registers consists of two 1-byte registers referred to as alu_left and alu_right they both store Alu data temporary during operation.
They are both controlled by the left_ctrl and right_ctrl respectively. Their address modes are given below:


Stack Pointer (SPR):
The stack pointer (SP) contains the address of the next available location in an external push-down/pop-up stack. The stack is normally a RAM that may have any location
that is convenient .
It contains the address of the next free location on the stack. During an MCU reset or the reset stack pointer (RSP) instruction, the stack pointer is set to location
$007F. The stack pointer is then decremented as data is pushed onto the stack and incremented as data is pulled from the stack. The stack register is
controlled by the sp_ctrl and it has four addressing modes:

Condition Code Register (CCR):
The condition code register (CCR) is a 5-bit register in which four bits are used to indicate the results of the instruction executed, and the fifth bit indicates whether
interrupts are masked. The CC register is controlled by the cc_ctrl signal, and it has four addressing modes:

The 5-bit register can be tested individually by a program, and specific actions can be taken as a result of their state. Each bit has will be explained below.
The flags:
The cpu has a total of 5flags in the cc_out bit also called condition code register. The condition code register (CCR) is a 5-bit register in which four bits
are used to indicate the results of the instruction just executed, and the fifth bit indicates whether interrupts are masked. These bits can be tested individually by a program,
and specific actions can be taken as a result of their state.

Bit4 → Half Carry flag. This bit is set during ADD and ADC operations to indicate that a carry occurred between bits 3 and 4.
Bit3→ Interrupt mask. When this bit is set, the timer and external interrupt are masked (disabled). If an interrupt occurs while this bit is set, the interrupt is latched and processed as soon as the interrupt bit is cleared. N — Negative When set, this bit indicates that the result of the last arithmetic, logical, or data manipulation was negative.
Bit2 → Negative flag. When set, this bit indicates that the result of the last arithmetic, logical, or data manipulation was a negative value.
Bit1 → Zero flag. When set, this bit indicates that the result of the last arithmetic, logical, or data manipulation was 0.
Bit0 → Carry/Borrow flag. When set, this bit indicates that a carry or borrow out of the arithmetic logical unit (ALU) occurred during the last arithmetic operation. This bit also is affected during bit test and branch instructions and during shifts and rotates.
Pin Description
| Pin | Type | Interface | Description |
|---|---|---|---|
| Data_in | Input | Control_unit | CPU input data |
| Irq_uart | Input | mini-uart | Interrupt request from UART |
| Irq_timer | Input | Timer | Interrupt request from Timer |
| Irq_ext | Input | Control_unit | Interrupt request from Control unit |
| Reset | Input | Reset | Reset input (active high) |
| Clock | Input Input | cpu_clk | System Clock |
| Addr | Output | Peripherals | Address output from CPU |
| Vma | Output | Control unit | Valid Memory Address |
| RW | Output | Peripherals | Read/Write |
| Data_out | Output | Peripherals | Output Data from CPU |
The Instruction cycle (also known as the fetch–decode–execute cycle, or simply the fetch-execute cycle) is the cycle that the central processing unit (CPU) follows from boot-up until the computer has shut down in order to process instructions. A program residing in the memory unit of a computer consists of a sequence of instructions.
These instructions are executed by the processor by going through a cycle for each instruction. Instructions are processed under direction of the cpu in step-by-step manner. Each step is referred to as a phase. The cycle begins as soon as power is applied to the system, with an initial OPR value that is predefined by the system's architecture. Typically, this address points to a set of instructions in read-only memory (ROM), which begins the process of loading (or booting) the operating system.
There are 42 fundamental phases of the instruction cycle: The chart if given below:
library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity cpu05 is port ( clk : in std_logic; rst : in std_logic; vma : out std_logic; rw : out std_logic; addr : out std_logic_vector(15 downto 0); data_in : in std_logic_vector(7 downto 0); data_out : out std_logic_vector(7 downto 0); irq_ext : in std_logic; irq_timer : in std_logic; irq_uart : in std_logic ); end; architecture cpu_arch of cpu05 is type state_type is (reset_state, reset1_state, reset2_state, fetch_state, decode_state, exec_state, halt_state, brbit_state, branch_state, bsr_state, jsr_state, jsr1_state, jmp_state, swi_state, stop_state, rti_state, rti_cc_state, rti_ac_state, rti_ix_state, rti_pch_state, rti_pcl_state, rts_state, rts_pch_state, rts_pcl_state, wait_state, wait1_state, wait2_state, wait3_state, wait4_state, int_state, int1_state, int2_state, int3_state, int4_state, int5_state, int6_state, dir_state, ext_state, ix2_state, ix1_state, ix0_state, write_state ); type addr_type is (reset_addr, idle_addr, fetch_addr, read_addr, write_addr, push_addr, pull_addr, vect_hi_addr, vect_lo_addr ); type data_type is (ac_data, ix_data, cc_data, md_data, pc_lo_data, pc_hi_data ); type pc_type is (reset_pc, latch_pc, inc_pc, jmp_pc, bra_pc, pull_lo_pc, pull_hi_pc ); type ea_type is (reset_ea, latch_ea, fetch_first_ea, fetch_next_ea, loadix_ea, addix_ea, addpc_ea ); type op_type is (reset_op, latch_op, fetch_op ); type ac_type is (reset_ac, latch_ac, load_ac, pull_ac ); type ix_type is (reset_ix, latch_ix, load_ix, pull_ix ); type sp_type is (reset_sp, latch_sp, load_sp, inc_sp, dec_sp ); type cc_type is (reset_cc, latch_cc, load_cc, pull_cc ); type md_type is (reset_md, latch_md, load_md, fetch_md ); type iv_type is (latch_iv, rst_iv, swi_iv, irq_iv, tim_iv, uart_iv ); type left_type is (ac_left, ix_left, md_left ); type right_type is (md_right, bset_right, bclr_right, zero_right, one_right ); type alu_type is (alu_add, alu_adc, alu_sub, alu_sbc, alu_and, alu_ora, alu_eor, alu_tst, alu_inc, alu_dec, alu_clr, alu_neg, alu_com, alu_lsr, alu_lsl, alu_ror, alu_rol, alu_asr, alu_sei, alu_cli, alu_sec, alu_clc, alu_bset, alu_bclr, alu_btst, alu_ld, alu_st, alu_nop ); constant HFLAG : integer := 4; constant IFLAG : integer := 3; constant NFLAG : integer := 2; constant ZFLAG : integer := 1; constant CFLAG : integer := 0; -- -- internal registers -- signal ac: std_logic_vector(7 downto 0); -- accumulator signal ix: std_logic_vector(7 downto 0); -- index register signal sp: std_logic_vector(6 downto 0); -- stack pointer signal cc: std_logic_vector(4 downto 0); -- condition codes from alu signal pc: std_logic_vector(15 downto 0); -- program counter for opcode access signal ea: std_logic_vector(15 downto 0); -- effective addres for memory access signal op: std_logic_vector(7 downto 0); -- opcode register signal md: std_logic_vector(7 downto 0); -- memory data signal iv: std_logic_vector(2 downto 0); -- interrupt vector number signal state: state_type; -- -- unregistered signals -- (combinational logic) -- signal alu_left: std_logic_vector(8 downto 0); -- alu left input (bit 8 for carry) signal alu_right: std_logic_vector(8 downto 0); -- alu right input signal alu_out: std_logic_vector(8 downto 0); -- alu result output (unlatched) signal cc_out: std_logic_vector(4 downto 0); -- alu condition code outout (unlatched) signal bset_data_out: std_logic_vector(7 downto 0); signal bclr_data_out: std_logic_vector(7 downto 0); signal next_state: state_type; -- -- Syncronous Register Controls -- signal ac_ctrl: ac_type; signal ix_ctrl: ix_type; signal sp_ctrl: sp_type; signal cc_ctrl: cc_type; signal pc_ctrl: pc_type; signal ea_ctrl: ea_type; signal op_ctrl: op_type; signal md_ctrl: md_type; signal iv_ctrl: iv_type; -- -- Asynchronous Multiplexer Controls -- signal addr_ctrl: addr_type; -- address bus mutiplexer signal data_ctrl: data_type; -- data output mutiplexer signal left_ctrl: left_type; -- Left ALU input signal right_ctrl: right_type; -- Right ALU input signal alu_ctrl: alu_type; -- ALU opeartion -- -- bit set decoder table -- component bset_rom is port ( addr : in Std_Logic_Vector(2 downto 0); data : out Std_Logic_Vector(7 downto 0) ); end component bset_rom; -- -- bit clear decoder table -- component bclr_rom is port ( addr : in Std_Logic_Vector(2 downto 0); data : out Std_Logic_Vector(7 downto 0) ); end component bclr_rom; begin rom_set : bset_rom port map ( addr => op(3 downto 1), data => bset_data_out ); rom_clear : bclr_rom port map ( addr => op(3 downto 1), data => bclr_data_out ); ---------------------------------- -- -- opcode register -- ---------------------------------- op_reg: process( clk, op_ctrl, data_in, op ) begin if clk'event and clk = '0' then case op_ctrl is when reset_op => op <= "10011101"; -- reset with NOP when fetch_op => op <= data_in; when others => -- when latch_op => op <= op; end case; end if; end process; ----------------------------------- -- -- accumulator -- ------------------------------------ ac_reg : process( clk, ac_ctrl, alu_out, ac, ix, data_in ) begin if clk'event and clk = '0' then case ac_ctrl is when reset_ac => -- released from reset ac <= "00000000"; when load_ac => -- single or dual operation ac <= alu_out(7 downto 0); when pull_ac => -- read acc / increment sp ac <= data_in; when others => -- halt on undefine states -- when latch_ac => -- no operation on acc ac <= ac; end case; end if; end process; ------------------------------------ -- -- condition code register -- ------------------------------------ cc_reg : process( clk, cc_ctrl, cc_out ) begin if clk'event and clk = '0' then case cc_ctrl is when reset_cc => -- released from reset cc <= "00000"; when load_cc => -- single or dual operation cc <= cc_out; when pull_cc => -- read cc / increment sp cc <= data_in(4 downto 0); when others => -- halt on undefine states -- when latch_cc => -- no operation on acc cc <= cc; end case; end if; end process; ------------------------------------ -- -- index register -- ------------------------------------ ix_reg : process( clk, ix_ctrl, alu_out, ac, ix, data_in ) begin if clk'event and clk = '0' then case ix_ctrl is when reset_ix => -- released from reset ix <= "00000000"; when load_ix => -- execute / = alu out ix <= alu_out(7 downto 0); when pull_ix => -- read ixreg / increment sp ix <= data_in; when others => -- when latch_ix => -- no change in ix ix <= ix; end case; end if; end process; ------------------------------------ -- -- stack pointer -- ------------------------------------ sp_reg : process( clk, sp_ctrl, sp ) begin if clk'event and clk = '0' then case sp_ctrl is when reset_sp => -- released from reset sp <= "1111111"; when inc_sp => -- pop registers sp <= sp + 1; when dec_sp => -- push registes sp <= sp - 1; when others => -- when latch_sp => -- no change in sp sp <= sp; end case; end if; end process; ------------------------------------ -- -- program counter -- ------------------------------------ pc_reg : process( clk, pc_ctrl, pc, ea, data_in ) variable offset : std_logic_vector(15 downto 0); begin if clk'event and clk = '0' then case pc_ctrl is when reset_pc => -- released from reset pc <= "0000000000000000"; when inc_pc => -- fetch next opcode pc <= pc + 1; when jmp_pc => -- load pc with effective address pc <= ea; when bra_pc => -- add effective address to pc if ea(7) = '0' then -- sign extend offset offset := "00000000" & ea(7 downto 0); else offset := "11111111" & ea(7 downto 0); end if; pc <= pc + offset; when pull_lo_pc => -- load pc lo byte from memory pc(15 downto 8) <= pc(15 downto 8); pc(7 downto 0) <= data_in; when pull_hi_pc => -- load pc hi byte from memory pc(15 downto 8) <= data_in; pc(7 downto 0) <= pc(7 downto 0); when others => -- halt on undefine states -- when latch_pc => -- no change in pc pc <= pc; end case; end if; end process; ------------------------------------ -- -- effective address register -- ------------------------------------ ea_reg: process( clk, ea_ctrl, ea, pc, ix, data_in ) variable offset : std_logic_vector(15 downto 0); begin if clk'event and clk = '0' then case ea_ctrl is when reset_ea => -- released from reset / fetch ea <= "0000000000000000"; when loadix_ea => -- load ea with index register ea <= "00000000" & ix; when addpc_ea => -- add pc to ea if ea(7) = '0' then -- sign extend offset offset := "00000000" & ea(7 downto 0); else offset := "11111111" & ea(7 downto 0); end if; ea <= offset + pc; when addix_ea => -- add index register to ea ea <= ea + ("00000000" & ix ); when fetch_first_ea => -- load ea lo byte from memory ea(15 downto 8) <= "00000000"; ea(7 downto 0) <= data_in; when fetch_next_ea => -- load ea with second from memory ea(15 downto 8) <= ea(7 downto 0); ea(7 downto 0) <= data_in; when others => -- halt on undefine states -- when latch_ea => -- no change in ea ea <= ea; end case; end if; end process; ---------------------------------- -- -- memory data register -- latch memory byte input -- ---------------------------------- md_reg: process( clk, md_ctrl, data_in, md ) begin if clk'event and clk = '0' then case md_ctrl is when reset_md => md <= "00000000"; when latch_md => md <= md; when load_md => -- latch alu output md <= alu_out(7 downto 0); when fetch_md => md <= data_in; when others => null; end case; end if; end process; ---------------------------------- -- -- interrupt vector register -- ---------------------------------- iv_reg: process( clk, iv_ctrl, iv ) begin if clk'event and clk = '0' then case iv_ctrl is when rst_iv => iv <= "111"; -- $FFFE/$FFFF when swi_iv => iv <= "110"; -- $FFFC/$FFFD when irq_iv => iv <= "101"; -- $FFFA/$FFFB when tim_iv => iv <= "100"; -- $FFF8/$FFF9 when uart_iv => iv <= "011"; -- $FFFA/$FFFB when others => -- when latch_iv => iv <= iv; end case; end if; end process; ---------------------------------- -- -- Address output multiplexer -- Work out which register to apply to the address bus -- Note that the multiplexer output is asyncronous -- ---------------------------------- mux_addr: process( clk, addr_ctrl, pc, ea, sp, iv ) begin case addr_ctrl is when reset_addr => -- when held in reset addr <= "1111111111111111"; vma <= '0'; rw <= '1'; when fetch_addr => -- fetch opcode from pc addr <= pc; vma <= '1'; rw <= '1'; when read_addr => -- read from memory addr <= ea; vma <= '1'; rw <= '1'; when write_addr => -- write to memory addr <= ea; vma <= '1'; rw <= '0'; when push_addr => -- write to stack addr <= ("000000001" & sp); vma <= '1'; rw <= '0'; when pull_addr => -- read from stack addr <= ("000000001" & sp); vma <= '1'; rw <= '1'; when vect_hi_addr => -- fetch interrupt vector hi addr <= "111111111111" & iv & "0"; vma <= '1'; rw <= '1'; when vect_lo_addr => -- fetch interrupt vector lo addr <= "111111111111" & iv & "1"; vma <= '1'; rw <= '1'; when others => -- undefined all high addr <= "1111111111111111"; vma <= '0'; rw <= '1'; end case; end process; ---------------------------------- -- -- Data Output Multiplexer -- select data to be written to memory -- note that the output is asynchronous -- ---------------------------------- mux_data: process( clk, data_ctrl, md, pc, cc, ac, ix ) variable data_out_v : std_logic_vector(7 downto 0); begin case data_ctrl is when ac_data => -- save accumulator data_out <= ac; when ix_data => -- save index register data_out <= ix; when cc_data => -- save condition codes data_out <= "000" & cc; when others => -- when md_data => -- alu latched output data_out <= md; when pc_lo_data => -- save pc low byte data_out <= pc(7 downto 0); when pc_hi_data => data_out <= pc(15 downto 8); -- save pc high byte end case; end process; ---------------------------------- -- -- alu left mux -- asynchronous input as register is already latched -- ---------------------------------- mux_left: process( clk, left_ctrl, ac, ix, md ) begin case left_ctrl is when ac_left => alu_left <= "0" & ac; -- dual op argument when ix_left => alu_left <= "0" & ix; -- dual op argument when md_left => alu_left <= "0" & md; when others => alu_left <= "000000000"; end case; end process; ---------------------------------- -- -- alu right mux -- asynchronous input as register is already latched -- ---------------------------------- mux_right: process( clk, right_ctrl, data_in, bset_data_out, bclr_data_out, md ) begin case right_ctrl is when others => -- when md_right => alu_right <= "0" & md; -- dual op argument when bset_right => alu_right <= "0" & bset_data_out; when bclr_right => alu_right <= "0" & bclr_data_out; when zero_right => alu_right <= "000000000"; when one_right => alu_right <= "000000001"; end case; end process; ---------------------------------- -- -- Arithmetic Logic Unit -- ---------------------------------- mux_alu: process( clk, alu_ctrl, cc, alu_left, alu_right ) variable alu_v : std_logic_vector(8 downto 0); variable low_v : std_logic_vector(4 downto 0); variable high_v : std_logic_vector(4 downto 0); begin case alu_ctrl is when alu_bset => alu_v := alu_left or alu_right; -- bit when alu_bclr => alu_v := alu_left and alu_right; -- bclr when alu_btst => alu_v := alu_left and alu_right; -- tst when alu_add => low_v := ("0" & alu_left(3 downto 0)) + ("0" & alu_right(3 downto 0)); high_v := ("0" & alu_left(7 downto 4)) + ("0" & alu_right(7 downto 4)) + low_v(4); alu_v := high_v(4 downto 0) & low_v(3 downto 0); -- add when alu_adc => low_v := ("0" & alu_left(3 downto 0)) + ("0" & alu_right(3 downto 0)) + ("0000" & cc(CFLAG)); high_v := ("0" & alu_left(7 downto 4)) + ("0" & alu_right(7 downto 4)) + low_v(4); alu_v := high_v(4 downto 0) & low_v(3 downto 0); -- adc when alu_sub => alu_v := alu_left - alu_right; -- sub / cmp when alu_sbc => alu_v := alu_left - alu_right - ("00000000" & cc(CFLAG)); -- sbc when alu_and => alu_v := alu_left and alu_right; -- and/bit when alu_ora => alu_v := alu_left or alu_right; -- or when alu_eor => alu_v := alu_left xor alu_right; -- eor/xor when alu_lsl => alu_v := alu_left(7 downto 0) & "0"; -- lsl when alu_lsr => alu_v := alu_left(0) & "0" & alu_left(7 downto 1); -- lsr when alu_asr => alu_v := alu_left(0) & alu_left(7) & alu_left(7 downto 1); -- asr when alu_rol => alu_v := alu_left(7 downto 0) & cc(CFLAG); -- rol when alu_ror => alu_v := alu_left(0) & cc(CFLAG) & alu_left(7 downto 1); -- ror when alu_inc => alu_v := alu_left + "000000001"; -- inc when alu_dec => alu_v := alu_left(8 downto 0) - "000000001"; -- dec when alu_neg => alu_v := "000000000" - alu_left(8 downto 0); -- neg when alu_com => alu_v := not alu_left(8 downto 0); -- com when alu_clr => alu_v := "000000000"; -- clr when alu_ld => alu_v := alu_right(8 downto 0); when alu_st => alu_v := alu_left(8 downto 0); when others => alu_v := alu_left(8 downto 0); -- nop end case; -- -- carry bit -- case alu_ctrl is when alu_add | alu_adc | alu_sub | alu_sbc | alu_lsl | alu_lsr | alu_rol | alu_ror | alu_asr | alu_neg | alu_com => cc_out(CFLAG) <= alu_v(8); when alu_btst => cc_out(CFLAG) <= not( alu_v(7) or alu_v(6) or alu_v(5) or alu_v(4) or alu_v(3) or alu_v(2) or alu_v(1) or alu_v(0) ); when alu_sec => cc_out(CFLAG) <= '1'; when alu_clc => cc_out(CFLAG) <= '0'; when others => cc_out(CFLAG) <= cc(CFLAG); end case; -- -- Zero flag -- case alu_ctrl is when alu_add | alu_adc | alu_sub | alu_sbc | alu_and | alu_ora | alu_eor | alu_lsl | alu_lsr | alu_rol | alu_ror | alu_asr | alu_inc | alu_dec | alu_neg | alu_com | alu_clr | alu_ld | alu_st => cc_out(ZFLAG) <= not( alu_v(7) or alu_v(6) or alu_v(5) or alu_v(4) or alu_v(3) or alu_v(2) or alu_v(1) or alu_v(0) ); when others => cc_out(ZFLAG) <= cc(ZFLAG); end case; -- -- negative flag -- case alu_ctrl is when alu_add | alu_adc | alu_sub | alu_sbc | alu_and | alu_ora | alu_eor | alu_lsl | alu_lsr | alu_rol | alu_ror | alu_asr | alu_inc | alu_dec | alu_neg | alu_com | alu_clr | alu_ld | alu_st => cc_out(NFLAG) <= alu_v(7); when others => cc_out(NFLAG) <= cc(NFLAG); end case; -- -- Interrupt mask flag -- case alu_ctrl is when alu_sei => cc_out(IFLAG) <= '1'; -- set interrupt mask when alu_cli => cc_out(IFLAG) <= '0'; -- clear interrupt mask when others => cc_out(IFLAG) <= cc(IFLAG); -- interrupt mask end case; -- -- Half Carry flag -- case alu_ctrl is when alu_add | alu_adc => cc_out(HFLAG) <= low_v(4); when others => cc_out(HFLAG) <= cc(HFLAG); end case; alu_out <= alu_v; end process; ------------------------------------ -- -- state sequencer -- ------------------------------------ sequencer : process( state, data_in, ac, cc, ix, sp, ea, md, pc, op, irq_ext, irq_timer, irq_uart ) begin case state is -- -- RESET: -- Here if processor held in reset -- On release of reset go to RESET1 -- when reset_state => -- release from reset ac_ctrl <= reset_ac; cc_ctrl <= reset_cc; ix_ctrl <= reset_ix; sp_ctrl <= reset_sp; pc_ctrl <= reset_pc; op_ctrl <= reset_op; ea_ctrl <= reset_ea; md_ctrl <= reset_md; iv_ctrl <= rst_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= reset_addr; -- address bus mutiplexer data_ctrl <= md_data; -- data output mutiplexer next_state <= reset1_state; -- -- RESET1: -- address bus = reset vector hi -- Load PC high with high byte -- go to RESET2 -- when reset1_state => -- fetch hi reset vector ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; pc_ctrl <= pull_hi_pc; op_ctrl <= latch_op; ea_ctrl <= latch_ea; md_ctrl <= latch_md; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= vect_hi_addr; data_ctrl <= md_data; -- data output mutiplexer next_state <= reset2_state; -- -- RESET2: -- address bus = reset vector lo -- Load PC low with low byte -- go to FETCH -- when reset2_state => -- fetch low reset vector ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; pc_ctrl <= pull_lo_pc; op_ctrl <= latch_op; ea_ctrl <= latch_ea; md_ctrl <= latch_md; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= vect_lo_addr; data_ctrl <= md_data; -- data output mutiplexer next_state <= fetch_state; -- -- FETCH: -- fetch opcode, -- advance the pc, -- clear the effective address (ea) register -- goto DECODE -- when fetch_state => -- fetch instruction case op(7 downto 4) is -- when "0000" => -- BRSET/ BRCLR -- null; -- when "0001" => -- BSET/ BCLR -- null; -- when "0010" => -- BR conditional -- null; -- when "0011" => -- single op direct -- null; when "0100" => -- single op accum ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; case op( 3 downto 0 ) is when "0000" => -- neg right_ctrl <= zero_right; alu_ctrl <= alu_neg; when "0011" => -- com right_ctrl <= zero_right; alu_ctrl <= alu_com; when "0100" => -- lsr right_ctrl <= zero_right; alu_ctrl <= alu_lsr; when "0110" => -- ror right_ctrl <= zero_right; alu_ctrl <= alu_ror; when "0111" => -- asr right_ctrl <= zero_right; alu_ctrl <= alu_asr; when "1000" => -- lsl right_ctrl <= zero_right; alu_ctrl <= alu_lsl; when "1001" => -- rol right_ctrl <= zero_right; alu_ctrl <= alu_rol; when "1010" => -- dec right_ctrl <= one_right; alu_ctrl <= alu_dec; when "1011" => -- undef right_ctrl <= zero_right; alu_ctrl <= alu_nop; when "1100" => -- inc right_ctrl <= one_right; alu_ctrl <= alu_inc; when "1101" => -- tst right_ctrl <= zero_right; alu_ctrl <= alu_tst; when "1110" => -- undef right_ctrl <= zero_right; alu_ctrl <= alu_nop; when "1111" => -- clr right_ctrl <= zero_right; alu_ctrl <= alu_clr; when others => right_ctrl <= zero_right; alu_ctrl <= alu_nop; end case; when "0101" => -- single op ix reg ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= load_ix; sp_ctrl <= latch_sp; left_ctrl <= ix_left; case op( 3 downto 0 ) is when "0000" => -- neg right_ctrl <= zero_right; alu_ctrl <= alu_neg; when "0011" => -- com right_ctrl <= zero_right; alu_ctrl <= alu_com; when "0100" => -- lsr right_ctrl <= zero_right; alu_ctrl <= alu_lsr; when "0110" => -- ror right_ctrl <= zero_right; alu_ctrl <= alu_ror; when "0111" => -- asr right_ctrl <= zero_right; alu_ctrl <= alu_asr; when "1000" => -- lsl right_ctrl <= zero_right; alu_ctrl <= alu_lsl; when "1001" => -- rol right_ctrl <= zero_right; alu_ctrl <= alu_rol; when "1010" => -- dec right_ctrl <= one_right; alu_ctrl <= alu_dec; when "1011" => -- undef right_ctrl <= zero_right; alu_ctrl <= alu_nop; when "1100" => -- inc right_ctrl <= one_right; alu_ctrl <= alu_inc; when "1101" => -- tst right_ctrl <= zero_right; alu_ctrl <= alu_tst; when "1110" => -- undef right_ctrl <= zero_right; alu_ctrl <= alu_nop; when "1111" => -- clr right_ctrl <= zero_right; alu_ctrl <= alu_clr; when others => right_ctrl <= zero_right; alu_ctrl <= alu_nop; end case; -- when "0110" => -- single op IX1 -- null; -- when "0111" => -- single op IX0 -- null; -- when "1000" => -- inherent stack operators -- null; when "1001" => -- inherent operators case op( 3 downto 0 ) is -- when "0000" => -- undef -- null; -- when "0001" => -- undef -- null; -- when "0010" => -- undef -- null; -- when "0011" => -- undef -- null; -- when "0100" => -- undef -- null; -- when "0101" => -- undef -- null; -- when "0110" => -- undef -- null; when "0111" => -- tax ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= load_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= bclr_right; alu_ctrl <= alu_st; when "1000" => -- clc ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= bclr_right; alu_ctrl <= alu_clc; when "1001" => -- sec ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= bclr_right; alu_ctrl <= alu_sec; when "1010" => -- cli ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= bclr_right; alu_ctrl <= alu_cli; when "1011" => -- sei ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= bclr_right; alu_ctrl <= alu_sei; when "1100" => -- rsp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= reset_sp; left_ctrl <= ac_left; right_ctrl <= bclr_right; alu_ctrl <= alu_nop; -- when "1101" => -- nop -- null; -- when "1110" => -- undef -- null; when "1111" => -- txa ac_ctrl <= load_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ix_left; right_ctrl <= bclr_right; alu_ctrl <= alu_st; when others => ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ix_left; right_ctrl <= bclr_right; alu_ctrl <= alu_nop; end case; -- -- dual operand addressing modes -- when "1010" | -- dual op imm "1011" | -- dual op dir "1100" | -- dual op ext "1101" | -- dual op ix2 "1110" | -- dual op ix1 "1111" => -- dual op ix0 case op( 3 downto 0 ) is when "0000" => -- sub ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_sub; when "0001" => -- cmp ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_sub; when "0010" => -- sbc ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_sbc; when "0011" => -- cpx ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ix_left; right_ctrl <= md_right; alu_ctrl <= alu_sub; when "0100" => -- and ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_and; when "0101" => -- bit ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_and; when "0110" => -- lda ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_ld; when "0111" => -- sta ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_st; when "1000" => -- eor ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_eor; when "1001" => -- adc ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_adc; when "1010" => -- ora ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_ora; when "1011" => -- add ac_ctrl <= load_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_add; -- when "1100" => -- jmp -- null; -- when "1101" => -- jsr -- null; when "1110" => -- ldx ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= load_ix; sp_ctrl <= latch_sp; left_ctrl <= ix_left; right_ctrl <= md_right; alu_ctrl <= alu_ld; when "1111" => -- stx ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ix_left; right_ctrl <= md_right; alu_ctrl <= alu_st; when others => ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_nop; end case; when others => ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= ac_left; right_ctrl <= md_right; alu_ctrl <= alu_nop; end case; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= inc_pc; op_ctrl <= fetch_op; addr_ctrl <= fetch_addr; data_ctrl <= md_data; -- data output mutiplexer if irq_ext = '1' and cc(IFLAG) = '0' then iv_ctrl <= irq_iv; next_state <= int_state; elsif irq_timer = '1' and cc(IFLAG) = '0' then iv_ctrl <= tim_iv; next_state <= int_state; elsif irq_uart = '1' and cc(IFLAG) = '0' then iv_ctrl <= uart_iv; next_state <= int_state; else iv_ctrl <= latch_iv; next_state <= decode_state; end if; -- -- DECODE: -- decode the new opcode, -- fetch the next byte into the low byte of the ea , -- work out if you need to advance the pc, (two or three byte op) -- work out the next state based on the addressing mode. -- evaluate conditional branch execution -- when decode_state => -- decode instruction / fetch next byte ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= fetch_first_ea; md_ctrl <= fetch_md; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= fetch_addr; data_ctrl <= md_data; -- data output mutiplexer case op(7 downto 4) is -- addressing modes -- -- branch on bit set / clear -- when "0000" => pc_ctrl <= inc_pc; -- advance the pc next_state <= dir_state; -- -- bit set / clear direct page -- when "0001" => pc_ctrl <= inc_pc; -- advance the pc next_state <= dir_state; -- -- branch on condition codes -- if condtion = true -- go to "branch" state -- if conition = false -- go to "fetch" state -- when "0010" => pc_ctrl <= inc_pc; -- advance the pc case op(3 downto 0) is when "0000" => -- bra next_state <= branch_state; when "0001" => -- brn next_state <= fetch_state; when "0010" => -- bhi if cc(CFLAG) = '0' and cc(ZFLAG) = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "0011" => -- bls if cc(CFLAG) = '1' or cc(ZFLAG) = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when "0100" => -- bcc if cc(CFLAG) = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "0101" => -- bcs if cc(CFLAG) = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when "0110" => -- bne if cc(ZFLAG) = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "0111" => -- beq if cc(ZFLAG) = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1000" => -- bhcc if cc(HFLAG) = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1001" => -- bhcs if cc(HFLAG) = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1010" => -- bpl if cc(NFLAG) = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1011" => -- bmi if cc(NFLAG) = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1100" => -- bmc if cc(IFLAG) = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1101" => -- bms if cc(IFLAG) = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1110" => -- bil if irq_ext = '0' then next_state <= branch_state; else next_state <= fetch_state; end if; when "1111" => -- bih if irq_ext = '1' then next_state <= branch_state; else next_state <= fetch_state; end if; when others => null; end case; -- end of conditional branch decode -- -- Single Operand direct addressing -- when "0011" => pc_ctrl <= inc_pc; -- advance the pc (2 byte instruction) next_state <= dir_state; -- -- Single Operand accumulator -- when "0100" => pc_ctrl <= latch_pc; next_state <= fetch_state; -- -- Single Operand index register -- when "0101" => pc_ctrl <= latch_pc; next_state <= fetch_state; -- -- Single Operand memory 8 bit indexed -- when "0110" => pc_ctrl <= inc_pc; -- advance the pc (2 byte instruction) next_state <= ix1_state; -- -- Single Operand memory 0 bit indexed -- when "0111" => pc_ctrl <= latch_pc; -- hold the pc (1 byte instruction) next_state <= ix0_state; -- -- stack and interrupt operators -- when "1000" => pc_ctrl <= latch_pc; case op(3 downto 0) is when "0000" => next_state <= rti_state; when "0001" => next_state <= rts_state; when "0011" => next_state <= swi_state; when "1110" => next_state <= stop_state; when "1111" => next_state <= wait_state; when others => next_state <= fetch_state; end case; -- end of stack decode -- -- Inherent operators -- when "1001" => pc_ctrl <= latch_pc; next_state <= fetch_state; -- -- dual operand immediate addressing -- when "1010" => pc_ctrl <= inc_pc; -- advance the pc (2 byte instruction) case op(3 downto 0) is when "1101" => -- bsr next_state <= bsr_state; when others => next_state <= fetch_state; end case; -- -- dual operand direct addressing -- when "1011" => pc_ctrl <= inc_pc; -- advance the pc (2 byte instruction) next_state <= dir_state; -- -- dual operand extended addressing -- when "1100" => pc_ctrl <= inc_pc; -- advance the pc (3 byte instruction) next_state <= ext_state; -- -- dual operand 16 bit indexed addressing -- when "1101" => pc_ctrl <= inc_pc; -- advance the pc (3 byte instruction) next_state <= ix2_state; -- -- dual operand 8 bit indexed addressing -- when "1110" => pc_ctrl <= inc_pc; -- advance the pc (3 byte instruction) next_state <= ix1_state; -- -- dual operand direct page indexed addressing -- when "1111" => pc_ctrl <= latch_pc; next_state <= ix0_state; -- -- catch undefined states -- when others => pc_ctrl <= latch_pc; next_state <= fetch_state; end case; -- end of instruction decode state -- -- perform addressing state sequence -- when ext_state => -- fetch second address byte ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; cc_ctrl <= latch_cc; pc_ctrl <= inc_pc; ea_ctrl <= fetch_next_ea; op_ctrl <= latch_op; md_ctrl <= latch_md; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= fetch_addr; -- read effective address data_ctrl <= pc_lo_data; -- read memory data next_state <= dir_state; when ix2_state => -- fetch second index offest byte ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; cc_ctrl <= latch_cc; pc_ctrl <= inc_pc; ea_ctrl <= fetch_next_ea; op_ctrl <= latch_op; md_ctrl <= fetch_md; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= fetch_addr; data_ctrl <= pc_lo_data; next_state <= ix1_state; when ix1_state => -- add ixreg to effective address ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; cc_ctrl <= latch_cc; pc_ctrl <= latch_pc; ea_ctrl <= addix_ea; op_ctrl <= latch_op; md_ctrl <= latch_md; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; data_ctrl <= pc_lo_data; next_state <= dir_state; when ix0_state => -- load effective address with ixreg ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= loadix_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; data_ctrl <= pc_lo_data; next_state <= dir_state; when dir_state => -- read memory cycle ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; cc_ctrl <= latch_cc; ea_ctrl <= latch_ea; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; data_ctrl <= pc_lo_data; case op(7 downto 4) is when "0000" | -- BRSET / BRCLR "0001" | -- BSET / BCLR "0011" | -- single op DIR "0110" | -- single op IX1 "0111" => -- single op IX0 md_ctrl <= fetch_md; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= read_addr; -- read effective address next_state <= exec_state; when "1011" | -- dual op direct "1100" | -- dual op extended "1101" | -- dual op ix2 "1110" | -- dual op ix1 "1111" => -- dual op ix0 case op(3 downto 0) is when "0111" => -- sta md_ctrl <= load_md; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_st; -- ALU opeartion addr_ctrl <= idle_addr; -- read effective address next_state <= write_state; when "1100" => -- jmp md_ctrl <= latch_md; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; -- idle address next_state <= jmp_state; when "1101" => -- jsr md_ctrl <= latch_md; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; -- idle address next_state <= jsr_state; when "1111" => -- stx md_ctrl <= load_md; left_ctrl <= ix_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_st; -- ALU opeartion addr_ctrl <= idle_addr; -- read effective address next_state <= write_state; when others => md_ctrl <= fetch_md; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= read_addr; -- read effective address next_state <= fetch_state; end case; when others => md_ctrl <= fetch_md; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= read_addr; -- read effective address next_state <= fetch_state; end case; -- -- EXECUTE: -- decode opcode -- to determine if output of the ALU is transfered to a register -- or if alu output is written back to memory -- -- if opcode = dual operand or -- opcode = single operand accum / ixreg or -- opcode = branch on bit then -- goto fetch_state -- -- if opcode = single operand memory or -- opcode = bit set / clear or -- goto write_state -- when exec_state => -- execute alu operation pc_ctrl <= latch_pc; ea_ctrl <= latch_ea; op_ctrl <= latch_op; iv_ctrl <= latch_iv; addr_ctrl <= idle_addr; data_ctrl <= md_data; case op(7 downto 4) is when "0000" => -- branch set / clear ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= md_left; right_ctrl <= bset_right; alu_ctrl <= alu_btst; md_ctrl <= load_md; cc_ctrl <= load_cc; next_state <= brbit_state; when "0001" => -- bit set / clear ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; case op(0) is when '0' => -- bset left_ctrl <= md_left; right_ctrl <= bset_right; alu_ctrl <= alu_ora; md_ctrl <= load_md; cc_ctrl <= load_cc; when '1' => -- bclr left_ctrl <= md_left; right_ctrl <= bclr_right; alu_ctrl <= alu_and; md_ctrl <= load_md; cc_ctrl <= load_cc; when others => left_ctrl <= md_left; right_ctrl <= bclr_right; alu_ctrl <= alu_nop; md_ctrl <= latch_md; cc_ctrl <= latch_cc; end case; next_state <= write_state; when "0011" | -- single op direct "0110" | -- single op ix1 "0111" => -- single op ix0 ac_ctrl <= latch_ac; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; left_ctrl <= md_left; md_ctrl <= load_md; cc_ctrl <= load_cc; case op( 3 downto 0 ) is when "0000" => -- neg right_ctrl <= zero_right; alu_ctrl <= alu_neg; when "0011" => -- com right_ctrl <= zero_right; alu_ctrl <= alu_com; when "0100" => -- lsr right_ctrl <= zero_right; alu_ctrl <= alu_lsr; when "0110" => -- ror right_ctrl <= zero_right; alu_ctrl <= alu_ror; when "0111" => -- asr right_ctrl <= zero_right; alu_ctrl <= alu_asr; when "1000" => -- lsl right_ctrl <= zero_right; alu_ctrl <= alu_lsl; when "1001" => -- rol right_ctrl <= zero_right; alu_ctrl <= alu_rol; when "1010" => -- dec right_ctrl <= one_right; alu_ctrl <= alu_dec; when "1011" => -- undef right_ctrl <= zero_right; alu_ctrl <= alu_nop; when "1100" => -- inc right_ctrl <= one_right; alu_ctrl <= alu_inc; when "1101" => -- tst right_ctrl <= zero_right; alu_ctrl <= alu_tst; when "1110" => -- undef right_ctrl <= zero_right; alu_ctrl <= alu_nop; when "1111" => -- clr right_ctrl <= zero_right; alu_ctrl <= alu_clr; when others => right_ctrl <= zero_right; alu_ctrl <= alu_nop; end case; next_state <= write_state; when others => ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; md_ctrl <= latch_md; left_ctrl <= md_left; right_ctrl <= zero_right; alu_ctrl <= alu_nop; next_state <= fetch_state; end case; -- -- WRITE: -- write latched alu output to memory pointed to by ea register -- go to fetch state -- when write_state => -- write alu output to memory ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= md_left; right_ctrl <= zero_right; alu_ctrl <= alu_nop; addr_ctrl <= write_addr; data_ctrl <= md_data; -- select latched alu output to data bus next_state <= fetch_state; -- -- BRBIT -- Branch on condition of bit -- fetch the address offset -- advance the pc -- evaluate the carry bit to determine if we take the branch -- Carry = 0 if tested bit set -- Carry = 1 if tested bit clear -- op(0) = 0 if BRSET -- op(0) = 1 if BRCLR -- if carry = '1' -- goto branch state -- else -- goto execute state -- when brbit_state => -- fetch address offset ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= fetch_first_ea; md_ctrl <= latch_md; pc_ctrl <= inc_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= md_left; right_ctrl <= zero_right; alu_ctrl <= alu_nop; addr_ctrl <= fetch_addr; data_ctrl <= md_data; -- select latched alu output to data bus if (cc(CFLAG) xor op(0)) = '0' then -- check this ... I think it's right next_state <= branch_state; else next_state <= fetch_state; end if; -- -- BRANCH: -- take conditional branch -- branch (pc relative addressing) -- add effective address (ea register) to pc -- go to "fetch" state --- when branch_state => -- calculate branch address ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= bra_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; -- idle address bus data_ctrl <= md_data; -- read memory data next_state <= fetch_state; -- -- jump to subroutine -- when bsr_state => -- calculate effective jump address ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= addpc_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= idle_addr; data_ctrl <= md_data; next_state <= jsr_state; when jsr_state => -- store pc low / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; -- write stack address data_ctrl <= pc_lo_data; -- write PC low next_state <= jsr1_state; when jsr1_state => -- store pc high / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; -- write stack address data_ctrl <= pc_hi_data; -- write PC high next_state <= jmp_state; -- -- jump to address -- when jmp_state => -- load pc with effective address ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= jmp_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion (do nothing) addr_ctrl <= idle_addr; -- idle address data_ctrl <= pc_lo_data; -- next_state <= fetch_state; -- -- return from subroutine -- when rts_state => -- increment stack pointer ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; data_ctrl <= md_data; next_state <= rts_pch_state; when rts_pch_state => -- load pc high return address / increment sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= pull_hi_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; data_ctrl <= pc_hi_data; next_state <= rts_pcl_state; when rts_pcl_state => -- load pc low return address ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= pull_lo_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; data_ctrl <= pc_lo_data; next_state <= fetch_state; -- -- -- return from interrupt -- when rti_state => -- increment sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= fetch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; data_ctrl <= md_data; next_state <= rti_cc_state; when rti_cc_state => -- read cc / increment sp ac_ctrl <= latch_ac; cc_ctrl <= pull_cc; -- read Condition codes ix_ctrl <= latch_ix; sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; -- read stack address data_ctrl <= cc_data; -- output old CC next_state <= rti_ac_state; when rti_ac_state => -- read acc / increment sp ac_ctrl <= pull_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; -- read stack address data_ctrl <= ac_data; -- output Accumulator next_state <= rti_ix_state; when rti_ix_state => -- read ix / increment sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= pull_ix; -- read IX register sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; -- read stack address data_ctrl <= ix_data; -- output old ix register next_state <= rti_pch_state; when rti_pch_state => -- read pc hi / increment sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= inc_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= pull_hi_pc; -- read PC high op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; -- read stack address data_ctrl <= pc_hi_data; -- output old PC high next_state <= rti_pcl_state; when rti_pcl_state => -- read pc lo ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= pull_lo_pc; -- read PC low op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= pull_addr; -- read stack address data_ctrl <= pc_lo_data; -- output old PC Low next_state <= fetch_state; -- -- sofwtare interrupt (or any others interrupt state) -- when swi_state => ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= swi_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= idle_addr; data_ctrl <= md_data; next_state <= int_state; -- -- any sort of interrupt -- when int_state => -- store pc low / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; data_ctrl <= pc_lo_data; next_state <= int1_state; when int1_state => -- store pc hi / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; data_ctrl <= pc_hi_data; next_state <= int2_state; when int2_state => -- store ix / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; data_ctrl <= ix_data; next_state <= int3_state; when int3_state => -- store ac / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; data_ctrl <= ac_data; next_state <= int4_state; when int4_state => -- store cc / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU opeartion addr_ctrl <= push_addr; data_ctrl <= cc_data; next_state <= int5_state; when int5_state => -- fetch pc hi = int vector hi ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= pull_hi_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_sei; -- ALU operation addr_ctrl <= vect_hi_addr; data_ctrl <= pc_hi_data; next_state <= int6_state; when int6_state => -- fetch pc low = int vector low ac_ctrl <= latch_ac; cc_ctrl <= load_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= pull_lo_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_sei; -- ALU operation addr_ctrl <= vect_lo_addr; data_ctrl <= pc_lo_data; next_state <= fetch_state; -- -- stop the processor -- when stop_state => ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= idle_addr; data_ctrl <= md_data; next_state <= stop_state; -- -- wait for interrupt -- when wait_state => -- push pclow / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= push_addr; data_ctrl <= pc_lo_data; next_state <= wait1_state; when wait1_state => -- push pchi / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= push_addr; data_ctrl <= pc_hi_data; next_state <= wait2_state; when wait2_state => -- push ix / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= push_addr; data_ctrl <= ix_data; next_state <= wait3_state; when wait3_state => -- push ac / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= push_addr; data_ctrl <= ac_data; next_state <= wait4_state; when wait4_state => -- push cc / decrement sp ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= dec_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= ac_left; -- Left ALU input right_ctrl <= md_right; -- Right ALU input alu_ctrl <= alu_nop; -- ALU operation addr_ctrl <= push_addr; data_ctrl <= cc_data; next_state <= halt_state; -- -- halt cpu -- when halt_state => -- halt on halt ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= md_left; right_ctrl <= zero_right; alu_ctrl <= alu_nop; addr_ctrl <= idle_addr; data_ctrl <= md_data; -- select latched alu output to data bus next_state <= halt_state; -- -- undefined instruction -- when others => -- halt on undefine states ac_ctrl <= latch_ac; cc_ctrl <= latch_cc; ix_ctrl <= latch_ix; sp_ctrl <= latch_sp; ea_ctrl <= latch_ea; md_ctrl <= latch_md; pc_ctrl <= latch_pc; op_ctrl <= latch_op; iv_ctrl <= latch_iv; left_ctrl <= md_left; right_ctrl <= zero_right; alu_ctrl <= alu_nop; addr_ctrl <= idle_addr; data_ctrl <= md_data; -- select latched alu output to data bus next_state <= halt_state; end case; end process; -------------------------------- -- -- state machine -- -------------------------------- change_state: process( clk, rst, state ) begin if rst = '1' then state <= reset_state; elsif clk'event and clk = '0' then state <= next_state; end if; end process; -- output end CPU_ARCH;